Radaraltimeter auf dem inzwischen inaktiven ENVISAT zur Erfassung der Ozeanoberflächentopographie, der signifikanten Wellenhöhe und der Windstärke an der Meeresoberfläche. Auf diese Weise unterstützte der Sensor die Erforschung der Ozeanzirkulation, der Bathymetrie und die Charakteristik des marinen Anteils des Geoids. Durch die Bestimmung von Windgeschwindigkeit und Wellenhöhe wurde die Wetter- und Seegangsvorhersage unterstützt. Daneben war RA-2 in der Lage, Meereis, Polareis und die meisten Landoberflächen zu beobachten und darzustellen.
Engl. Akronym für Radio Detecting/Detection and Ranging; eine Technik, die die Reflexion von ausgestrahlten Radiowellen an Objekten misst und auswertet. In der Fernerkundung bezeichnet 'Radar' ein aktives System, das Mikrowellenstrahlung zur Gewinnung von Bildern benutzt. Verschiedene Satelliten mit Radarsensoren wie SAR-Lupe, TanDEM-X oder RADARSAT befinden sich im Orbit.
Das Funktionsprinzip der Radargeräte ist einfach zu verstehen, obwohl die theoretischen Grundlagen komplex sind. Das Arbeitsprinzip von Radargeräten basiert auf drei grundlegenden physikalischen Gesetzmäßigkeiten:
Konstante Ausbreitungsgeschwindigkeit der elektromagnetischen Wellen. Die elektromagnetischen Wellen breiten sich mit annähernder Lichtgeschwindigkeit (c0 =3 · 108 ms−1) aus.
Geradlinige Ausbreitung der elektromagnetischen Wellen. Bei der Ausbreitung der elektromagnetischen Wellen im Frequenzbereich der Radargeräte kann man von einer geradlinigen Ausbreitung ausgehen. Durch die konsequente Nutzung aller drei Gesetzmäßigkeiten können mithilfe von Radargeräten Rückschlüsse auf die Objekteigenschaften (z.B. Größe), Entfernung und Richtung gezogen werden.
Engl. radar altimeter, franz. radar altimétrique; Radaraltimeter sind aktive Sensoren, die die Reichweite der sehr kurzen elektromagnetischen Impulse des Radars nutzen, um das Profil der Oberflächentopographie entlang der Satellitenbahn zu messen. Diese Mikrowellengeräte, die im Gegensatz zum Windscatterometer die Wasseroberfläche nicht unter einem schrägen Einfallswinkel (Winkel zwischen Nadir und Antennenblickrichtung) bestrahlen, sondern unter dem Einfallswinkel Null (in Nadirrichtung). Aus der Zeitdifferenz zwischen Aussendung und Empfang der extrem kurzen Radarimpulse kann der Abstand zur Wasseroberfläche mit einer Genauigkeit im Zentimeterbereich gemessen werden.
Aus den Informationen von Radar-Höhenmessungen lassen sich eine Vielzahl von Parametern ableiten, wie z.B. die zeitlich variierende Höhe der Meeresoberfläche (Ozeantopographie), die seitliche Ausdehnung des Meereises und die Höhe großer Eisberge über dem Meeresspiegel sowie die Topographie von Landflächen und von Eisschilden und sogar die des Meeresbodens. Die Satellitenhöhenmessung liefert auch Informationen für die Kartierung der Windgeschwindigkeiten an der Meeresoberfläche und der signifikanten Wellenhöhen.
Aus den Radaraltimeterdaten lassen sich dann globale Karten über die Verformung des Meeresspiegels erstellen. Diese Verformung wird verursacht durch das räumlich-variable Schwerekraftfeld der Erde und durch Ozeanströmungen, die aufgrund der Corioliskraft eine Neigung der Wasseroberfläche verursachen. So fällt der Wasserspiegel z.B. am Puertorikanischen Graben, der mit einer starken Schwerkraftanomalie verbunden ist, auf einer Entfernung von 100 km ungefähr 15 m ab. Der Golfstrom, dessen Geschwindigkeit etwa 1-1,5 m/s beträgt, verursacht am Rand einen Sprung im Wasserspiegel um etwa 1 m. Außerdem kann man aus den Radaraltimeterdaten auch die mittlere Wellenhöhe und den Betrag der Windgeschwindigkeit erhalten. Die Information über die mittlere Wellenhöhe erhält man aus der Verformung des rückgestreuten Radarsignals und die Windgeschwindigkeit aus der Intensität des rückgestreuten Radarpulses.
Jason-3 und Jason-CS (Sentinel-6) steuern Radaraltimetrie-Missionen des Copernicus-Programms bei, die die Kontinuität wichtiger hochpräziser Beobachtungen der Meeresoberflächentopographie bis 2030+ in komplettem Zusammenwirkung mit der Copernicus-Meeresmission des Sentinel-3 gewährleisten werden.
Das folgende Schaubild zeigt die Zeitachse moderner Radaraltimeter von den neunziger Jahren bis zum nächsten Jahrzehnt, einschließlich der erwarteten oder angekündigten Missionsverlängerungen über die nominelle Lebensdauer der Satelliten hinaus. Vergangene Missionen sind in rot dargestellt. In Betrieb befindliche Satelliten sind orange dargestellt. Zukünftige Missionen und unbestätigte Missionsverlängerungen sind in gelb dargestellt. Diese Darstellung wird regelmäßig auf der Grundlage der jüngsten Ankündigungen der jeweiligen Programme und Agenturen aktualisiert.
Zeitleiste der Radaraltimetrie-Missionen Quelle: Aviso+ (dort auch die aktuellste Version)
Die Antenne eines Radarsystems sendet die elektromagnetische Strahlung aus, die zur Aufnahme dient, und empfängt die vom Gelände reflektierten Anteile. Bei abbildenden Radarsystemen werden unterschieden: die reale Antenne, wenn die wirksame Antennenlänge tatsächlich physisch gegeben ist, die synthetische Antenne, wenn unter Ausnutzung des Dopplereffekts eine virtuelle Antennenlänge erzeugt wird.
Engl. radar image, franz. image radar; ein mittels Radartechnik gewonnenes Bild. Radardaten haben komplexe Pixelwerte, Amplitude und Phase. Meist wird die Amplitude als Bildhelligkeit genutzt, um Radarbilder zu erzeugen. Die Bildphase ist für die Interferometrie von Bedeutung.
Die von einem Objekt zu einem Radarsystem reflektierte Radarstrahlung, welche ursprünglich von dessen Antenne ausgesandt wurde. Das Radarecho enthält Informationen über die Lage und die Entfernung des reflektierenden Objekts.
Fernerkundung unter Einsatz von aktiven Fernerkundungssystemen mit Sendern für die Energieabstrahlung und mit Antennen zum Empfang der (von der Erdoberfläche oder von Schwebeteilchen in der Atmosphäre) reflektierten Strahlung. Diese Radarsysteme decken das Spektrum der Millimeter- und Zentimeterwellen ab (sogenannter Mikrowellenbereich). Sie können bodengestützt, luftgestützt oder satellitengetragen sein. Die Radarinformation stellt eine wertvolle Ergänzung zu passiven Sensoren dar, die den sichtbaren oder infrarotenSpektralbereich nutzen. Da der Sensor die Szene aktiv beleuchtet, ist er unabhängig von der Tageszeit. Zudem ist in den langwelligen Frequenzbändern (Zentimeterbereich) die Signaldämpfung durch Witterungseinflüsse gering.
Für die Erdbeobachtung arbeitet die Radar-Fernerkundung in drei Wellenlängenbereichen: X-Band (2,4-4,5 cm), C-Band (4,5-7,5 cm), L-Band (15-30 cm). Das gebräuchlichste Monitoringsystem ist SAR (Synthetic Aperture Radar). Die abgestrahlte Energie ("Radarkeule") ist auf das Gelände seitlich der Überfluglinie gerichtet (side looking radar). Von dort erfolgt in Abhängigkeit von der Geländerauigkeit, dem Auftreffwinkel der Strahlung, der Landformen etc. eine spezifische Reflexion, die das Radarbild erzeugt. Dem Radarsender zugewandte Berghänge reflektieren dabei stärker als deren abgewandte Seite, was zu überzeichneten und verstärkten scheinbaren Terraindarstellungen führt. Auch die Reflexion bebauter Gebiete ist in Abhängigkeit vom Reflexionsverhalten der Materialien usw. sehr unterschiedlich.
Die erhöhte Eindringtiefe der L-Band-Wellenlänge ergibt wertvolle Information zum Gesteinsuntergrund und zum Wassergehalt in Bodenschichten und Vegetation. Als aus komplexen empirischen Formeln abgeleitete Faustregel kann gelten, dass bei trockener Vegetation bzw. trockenem Boden die Eindringtiefe rund die halbe Wellenlänge beträgt. Allerdings wurden bei sehr trockenen Sanden mit L-Band-Radar bereits Eindringtiefen bis zu zwei, drei Metern erzielt. Dieses Phänomen konnte u.a. dazu verwendet werden, um mittels Weltraum-Radaraufnahmen vom Space Shuttle aus fossile Entwässerungssysteme unter der rezenten Sandbedeckung der Sahara zu kartieren.
Ähnliche Unterschiede zeigt sich bei der Empfindlichkeit von SAR-Messungen im Hinblick auf die Waldstruktur und das Eindringen in das Kronendach bei verschiedenen Wellenlängen, die für luft- oder weltraumgestützte Fernerkundungsbeobachtungen der Landoberfläche verwendet werden.
Wellenlängenabhängige Durchdringung des Kronendaches
Ein C-Band-Signal dringt beispielsweise nur in die obersten Schichten der Baumkronen eines Waldes ein und wird daher hauptsächlich durch Rauigkeitsstreuung und eine begrenzte Menge an Volumenstreuung beeinflusst. Ein L-Band- oder P-Band-Signal hingegen dringt viel tiefer ein und erfährt daher eine stark verstärkte Volumenstreuung sowie eine zunehmende Menge an Double-Bounce-Streuung, die durch den Baumstamm verursacht wird.
Satelliten-Radaraufnahmen besitzen die Fähigkeit, sowohl nachts als auch durch Wolken, Aufnahmen der Erdoberfläche zu generieren. Denn die ausgesendeten Mikrowellen beleuchten die Erdoberfläche aktiv und durchdringen, aufgrund ihrer Wellenlänge, auch Wolken. Ein empfangenes Radar-Signal ist ein komplexes Signal und besteht aus der Intensität und der Phase des zurück gestreuten Echos. Mit Hilfe der Radar-Interferometrie (InSAR) können topographische Informationen (Höhen) sowie deren Veränderungen (Deformationen) bestimmt werden.
Weitgehende Durchdringung von Atmosphäre und Wolken
Teilweise Eindringung in Vegetation, Boden, Schnee und Eis möglich
Mikrowellensensoren erfassen im Wesentlichen physikalische Merkmale (optische Sensoren: chemische), z.B.:
Leitfähigkeit (Dielektrizitätskonstante)
Rauigkeit: viele natürliche Oberflächen weisen Rauhigkeitsstrukturen im Zentimeterbereich auf (z.B. Äcker)
Die Nutzung des Mikrowellenbereiches zur Erdbeobachtung bietet sich für eine Reihe unterschiedlicher Zwecke an, die mit verschiedenen Techniken angegangen werden. Die wichtigsten darunter sind:
Altimeter: aktive Instrumente, die in Nadirrichtung kurze Pulse aussenden und die Signallaufzeit auswerten. Altimeter liefern wichtige Daten zur Erzeugung globaler Karten der Verformung des Meeresspiegels, die etwa durch Schwankungen des Erdschwerefeldes oder Meeresströmungen verursacht werden.
Scatterometer: aktive Beleuchtung der Meeresoberfläche in Schrägsicht. Wellen beeinflussen die Intensität des zurückgestreuten Signals, was Rückschlüsse auf die Windverhältnisse ermöglicht.
Bildgebende Verfahren: Die größte Bedeutung in der Fernerkundung haben die Verfahren zur bildgebenden Erfassung der Landoberflächen der Erde erlangt. Im Gegensatz zu optischen Sensoren, die eher chemische Objektmerkmale erfassen (meist den reflektierten Anteil des einfallenden Sonnenlichts) messen Radarsensoren eher physikalische Größen. Neben der Objektgeometrie bestimmen vor allem die Leitfähigkeit des Materials, die häufig vom Wassergehalt bestimmt ist, sowie die Oberflächenrauigkeit das gemessene Signal.
Auch beim Wetterradar, also Radargeräten, die vorwiegend zur Erfassung von Wetterdaten dienen, können Differenzierungen nach untersuchten Parametern und eingesetzten Frequenzbereichen vorgenommen werden. Die Wahl des Frequenzbereiches bestimmt die Dämpfung der elektromagnetischen Wellen durch die Atmosphäre, mehr noch durch eine Wolke oder den Niederschlag. Die Arbeitsfrequenz bestimmt die mögliche Eindringtiefe der Radarstrahlen in dieses Niederschlagsgebiet und welche Objekte aus diesem Gebiet zu einer Reflexion beitragen. Das heißt, ob auf dem Wetterradar von diesem Gebiet nur die Außenkonturen zu sehen oder die innere Struktur erkennbar ist, ist abhängig von dieser Arbeitsfrequenz.
Frequenzabhängige Dämpfung in einem Regengebiet
Die Amplituden der Radargeräte sind nur relative Werte, die Kurven zeigen nur an, wie viel von der Regenverteilung an der Reflexion beteiligt sein kann. Die oberste (blaue) Kurve zeigt als Ursache der Dämpfung die geometrische Ausdehnung eines Gewitters mit 20 km im Durchmesser mit einer zum Zentrum hin zunehmenden Niederschlagsmenge bis 100 mm/h. Die nächste Kurve (in Pink) zeigt die im Pegel angeglichene Amplitude der Radarechos von einem Radargerät im S-Band. Die nächsten zwei Kurven zeigen das Gleiche von einem Radargerät im C-Band (Gelb) und einem im X-Band (Hellblau). Es ist ersichtlich, dass Wetterradargeräte im X-Band nur für den Nahbereich konzipiert werden können. Die Sendeenergie Radar im S-Band wird hingegen kaum gedämpft – das ist ebenfalls ein Zeichen dafür, dass dieses Radar dieses Niederschlagsgebiet nur sehr schwach anzeigen wird, da nicht genug Energie reflektiert wird. Für die gewünschte Reichweite müssen die notwendigen energetischen Bedingungen geschaffen werden. Wetterradargeräte haben deshalb einen weiten Bereich der genutzten Impulsleistung des Senders von nur wenigen Kilowatt bis hin zu mehreren Megawatt.
Engl. radar interferometry, franz. interférométrie; die Radarinterferometrie ist ein berührungsfreies, fernerkundliches Messverfahren mit einem aktiven Sensor. Die Radarinterferometrie ermöglicht die flächenhafte Bestimmung von großräumigen Bodenbewegungen wie sie z.B. infolge von Grundwasserentzug, Rohstoffgewinnung, Vulkanaktivität oder seismischen Ereignissen hervorgerufen werden. Die Radarinterferometrie hat in den letzten zwei Jahrzehnten aufgrund der Verfügbarkeit geeigneter abbildender Radarsysteme mit verschiedenen Sensoren im L-Band, C-Band und X-Band besonders im Bereich der Beobachtung von Bodenbewegungen für verschiedene geowissenschaftliche Fragestellungen erheblich an Bedeutung gewonnen, aber auch für die Generierung von digitalen Höhenmodellen. In den Archiven der Satellitenbetreiber z.B. der europäischen Weltraumorganisation ESA, des DLR / DFD, der JAXA oder MDA/CSA werden große Datenmengen gesammelt und Nutzern auch für retrospektive Untersuchungen zur Verfügung gestellt.
Bei herkömmlichen, abbildenden Radarsystemen wird jedem Punkt des abgebildeten Gebietes entsprechend seinem Abstand zum Sensor eine Position in der Bildebene zugeordnet. Die Intensität der Rückstreuung charakterisiert die Materialien der Oberfläche, deren Rauigkeit, Orientierung usw. Das Ergebnis ist ein zweidimensionales Bild des Testgebietes.
Eine Weiterentwicklung stellt die SAR-Interferometrie dar. Hierbei wird ein Testgebiet von zwei oder mehr unterschiedlichen Sensorpositionen aus abgebildet. Da es sich bei Radarsystemen um kohärente Systeme handelt, enthalten die Daten nicht nur Informationen über die Rückstreuintensität (Signalstärke) sondern auch eine Phaseninformation der kohärenten Welle zum Zeitpunkt der Reflexion. Die Aufnahmegeometrie ist damit ähnlich derjenigen bekannter stereometrischer Verfahren und hat zur Folge, daß verschiedene Zielpunkte unterschiedliche Weglängendifferenzen zu den Sensorpositionen besitzen.
Jedes Pixel in einem Radarbild ist Träger dieser beiden Arten von Informationen. Die Intensität charakterisiert die Materialien der Oberfläche, deren Rauigkeit, Orientierung usw. Sie führt zu einer bildhaften Wiedergabe des Geländes. Hingegen wird die Phaseninformation in ganz anderer Weise genutzt. Wenn das Radarsystem dasselbe Gelände von einer nahezu gleichen Position erneut aufnimmt, dann sind die Phasenbilder nicht identisch. Die Unterschiede hängen von den Objektentfernungen ab. Deshalb können durch die Kombination der Phasenbilder von geeigneten Mehrfachaufnahmen Entfernungsunterschiede errechnet werden, aus denen z.B. ein Digitales Geländemodell gewonnen werden kann.
Durch die Überlagerung von zwei Radaraufnahmen werden Interferogramme erzeugt, die als Messgröße die Phasendifferenz beider Aufnahmen enthalten. Das Interferogramm macht die Phasendifferenzen in Form farbiger Ringe (sog. Fringes) sichtbar. Da jeder dieser Ringe den gesamten Wertebereich einer Phase wiedergibt, weist das Interferogramm aber Mehrdeutigkeiten auf, die anschließend noch aufgelöst werden müssen. Aus der Phasendifferenz können Abstandsänderungen und daraus Höhenänderungen abgeleitet werden. Dazu müssen aus der Phasendifferenz noch verschiedene Signalanteile (aufgrund von z. B. Topographie, Atmosphäre, Rauschen) auf geeignete Weise eliminiert bzw. reduziert werden.
Für die radarinterferometrischen Auswertungen müssen die auszuwertenden Signale zwischen zwei Radaraufnahmen des gleichen Gebietes räumlich und auch zeitlich korrelieren. Veränderungen der Rückstreueigenschaften durch z.B. Vegetationswechsel, längere zeitliche Abstände der Aufnahmen oder auch starke Bodenbewegungsgradienten führen zu Dekorrelationen und damit zur systematischen Verfälschung der abgeleiteten Höhenänderung bis hin zur Nichtauswertbarkeit. Wichtigste Voraussetzung für eine erfolgreiche interferometrische Auswertung von Radardaten ist folglich eine „feste“ Phasenbeziehung (Kohärenz, d. h. Ähnlichkeit) zwischen den zu unterschiedlichen Zeitpunkten aufgezeichneten Aufnahmen.
Während bei stereoskopischen Auswertesystemen versucht wird, die Parallaxe durch direkte Messung der Weglängen zu bestimmen, wird beim interferometrischen SAR die Kohärenz des Signals ausgenutzt sowie die Tatsache, daß sich die Phase einer monochromatischen elektromagnetischen Welle proportional zur zurückgelegten Weglänge verhält. Eine Phasendifferenzmessung, wie sie in der SAR-Interferometrie letztendlich durchgeführt wird, ermöglicht über die Bestimmung des Wegunterschiedes die Ermittlung der gewünschten Höheninformation. Die Daten können zur Erstellung von digitalen Höhenmodellen, zur Detektion von Veränderungen im Zentimeterbereich, zur multitemporalen Klassifikation oder zur Detektion beweglicher Streuer verwendet werden.
In der Satellitenfernerkundung erzielte diese Technik ihren Durchbruch mit den Starts der Satelliten ERS-1 und ERS-2 1991 und 1995 sowie der SRTM im Jahr 2000. Letztere hat in den vergangenen Jahren ein nahezu globales Höhenmodell mit bisher unerreicht hoher geometrischer Auflösung geliefert. Weitere Radarsysteme sind PALSAR-2 auf dem japanischen Satelliten ALOS-2 und ASAR auf dem inzwischen inaktiven ENVISAT. Seit 2007 liefert der deutsche Satellit TerraSAR-X SAR-Daten. Seit 2010 wird dessen Mission durch den Satelliten TanDEM-X ergänzt.
Anwendungsfelder der Radarinterferometrie sind die Erfassung von Veränderungen der Erdoberfläche im mm- und cm-Bereich (Gletscher, Vulkanismus, Hangrutschungen, Erdbeben, bergbaubedingte Senkungen usw.) sowie die Vermessung von Meeresströmungen.
Teilgebiet der Physik der Atmosphäre. Bei diesem meteorologischen Fernmessverfahren werden mit RadarsystemenObjekte in der Atmosphäre geortet. Dies geschieht durch das Aussenden kurzer Impulse elektromagnetischer Wellen im Zentimeterbereich durch eine rotierende Antenne. Die von den Objekten reflektierten oder gestreuten Wellen werden durch dieselbe Antenne wieder empfangen, die aufgenommenen Signale auf dem Radarschirm sichtbar gemacht und elektronisch weiterverarbeitet.
Radargeräte können stationär oder mobil vom Boden aus operieren, sowie auf Luftfahrzeugen oder Satelliten montiert sein. Die bodengebundene Radarüberwachung der Atmosphäre dient im operationellen Bereich vorwiegend der Ergänzung der konventionellen meteorologischen Beobachtungen und damit der Verfeinerung der Wetteranalyse. Radarinformationen bilden mit die Grundlage für Warnungen vor besonderen Wettererscheinungen wie Hagel, Sturm, Starkniederschlägen oder auch der für Flugzeuge gefährlichen Windscherung (Wetterradar).
Eine lange bewährte Radaranwendung im Wetterdienst ist die Höhenwindmessung in Verbindung mit dem Aufstieg von Radiosonden (Bahnverfolgung).
Moderne Geräte nutzen den Doppler-Effekt zur Bestimmung des dreidimensionalen Windfeldes (Windprofiler). Die gleichzeitige Anwendung von Schallwellen (RASS), die der Atmosphäre Inhomogenitäten aufprägen, und dem diese Inhomogenitäten messenden Radar ermöglicht es, aus der spektralen Verteilung der Radarechos das Vertikalprofil der Schallgeschwindigkeit zu bestimmen. Da die Schallgeschwindigkeit von der Temperatur abhängt, erfolgt somit eine Messung des vertikalen Temperaturprofils, was z.Z. bis in eine Höhe von ca. 5 km möglich ist.
Von Satelliten aus können mit Hilfe von Radaraltimetern die Abweichungen des aktuellen vom idealen Meeresniveau (Geoid) mit einer Genauigkeit von ca. 10 cm bestimmt werden. Damit ist die kontinuierliche Erfassung des oberflächennahen Strömungssystems im Ozean prinzipiell möglich geworden.
Die erste satellitengestützte Mission, die Niederschlagsmessungen mit Hilfe von Radar und anderen Sensoren durchführte, war die amerikanisch-japanische Tropical Rainfall Measurement Mission (TRMM).
Beipiel: Hurrikan Rita
Die folgende Abbildung zeigt die Regenkonzentration im Gefolge des Hurrikans Rita, gemessen über den Zeitraum vom 18. bis zum 25. September 2005. Sie beruht auf den Multisensor-Daten des TRMM-Satelliten. Wolkendaten aus dem GOES-Satelliten der NOAA sind zum besseren Verständnis darübergelegt. Die Regengebiete sind in Farben dargestellt, die von grün (<30 mm) bis rot (>80 mm) reichen.
TRMM war der einzige Satellit (2005), der Regenradar und andere Mikrowelleninstrumente einsetzte, um die Regenmengen über den tropischen und subtropischen Ozeanen zu messen.
Das Konzept des Terms ‘Rückstreuung‘ wird in Fernerkundungsanwendungen zumeist durch den ‘Rückstreukoeffizienten‘ (σ0) beschrieben. Grundsätzlich beschreibt dieser Parameter, wieviel Strahlung (relativ zu ausgesandten Strahlung) den Sensor von einem Punkt auf der Erdoberfläche aus erreicht.
Radarszenen bestehen aus Pixeln, die jeweils die rückgestreute Energie für deren Fläche repräsentieren. Bei der Aussendung von Mikrowellenstrahlung bestimmen die physischen Eigenschaften der Erdoberfläche darüber, wieviel der ursprünglich ausgesandten Strahlung und in welchem Zustand diese zum Sensor zurückkehrt. (EOCollege).
Die RADARSAT Constellation Mission (RCM) ist die Weiterentwicklung des kanadischen RADARSAT-Programms mit dem Ziel, die Datenkontinuität der früheren RADARSAT-Missionen sicherzustellen. Sie besteht aus drei identischen Erdbeobachtungssatelliten mit Synthetic Aperture Radar (C-Band), die etwa halb so groß sind wie ihre Vorgänger.
Die Drei-Satelliten-Konfiguration ermöglicht (im Durchschnitt) tägliche Überflüge des riesigen kanadischen Territoriums und der Meeresanrainer, einschließlich der Arktis, bis zu viermal am Tag, sowie den täglichen Zugang zu jedem Punkt auf 90 % der Erdoberfläche. Die RADARSAT Constellation-Satelliten wurden am 12. Juni 2019 an Bord einer SpaceXFalcon 9-Rakete von der Vandenberg Air Force Base in Kalifornien gestartet.
Die 3 RCM-Satelliten mit gleichem Abstand in 600 km Höhe Quelle: Canadian Space Agency
RCM-Daten werden in einer Vielzahl von Bereichen eingesetzt, z. B. bei der Meeresüberwachung, der Überwachung von Ökosystemen, für militärische Aufgaben, in der Landwirtschaft, bei der Überwachung des Klimawandels und bei der Katastrophenhilfe. Das System ist als Mission mit mittlerer Auflösung konzipiert, die in erster Linie der regelmäßigen Überwachung großer geographischer Gebiete dient. Dadurch erhält man einen Überblick über die Landmasse Kanadas und die angrenzenden Wassergebiete. Das System umfasst auch hochauflösende Modi, die in erster Linie für das Katastrophenmanagement bestimmt sind.
Da das RCM über drei identische Raumfahrzeuge verfügt, die gemeinsam in einer Konstellation fliegen und nicht nur über eine wie RADARSAT-2, ist es in der Lage, alle 24 Stunden jeden Punkt auf 90 % der Erdoberfläche zu erfassen (mit Ausnahme der Gegend um den Südpol); es bietet (im Durchschnitt) täglich Bilder von Kanadas riesiger Landmasse, den Ozeanen und Küsten und erfasst Gebiete in der Arktis bis zu viermal täglich. Diese Kapazität ermöglicht die Erstellung zusammengesetzter Bilder, die Veränderungen im Laufe der Zeit aufzeigen, was besonders nützlich für die Überwachung des Klimawandels, der Entwicklung der Landnutzung und sogar der Auswirkungen des Menschen auf die Umwelt ist.
Im Gegensatz zu RADARSAT-2 ist RCM mit einem automatischen Identifizierungssystem für Schiffe (AIS, Automatic Identification System) ausgestattet. Die Kombination von RCM-Bildern mit weltraumgestützten AIS-Daten ermöglicht die Identifizierung von Schiffen und die Erkennung und Verfolgung sog. 'dunkler Schiffe' (die eigentlich AIS-Signale senden sollten, dies aber nicht tun), sowohl in kanadischen Gewässern als auch anderswo.
Die RCM-Satelliten operieren in einer niedrigen Erdumlaufbahn auf einer Höhe von 600 km. Sie bewegen sich mit 27.200 km/h und brauchen etwa 96 Minuten, um die Erde zu umkreisen. Die Umlaufbahn jedes Satelliten wird in einer "Röhre" mit einem Durchmesser von 100 m genau eingehalten.
Kanadischer, inzwischen inaktiver Erdbeobachtungssatellit mit Aufgaben zur physischen Ozeanographie, zur Eis- und Schneebedeckung, zur Beobachtung von Landflächen und zur Unterstützung des nachhaltigen Umgangs mit Ressourcen.
Radarsat bewegte sich auf einer sonnensynchronen Umlaufbahn in 798 km Höhe um die Erde bei einer Inklination von 98,6°. Durch die Umlaufbahn von der Morgendämmerung bis zur Abenddämmerung waren die Solarpaneele fast ständig dem Sonnenlicht ausgesetzt, was eine zuverlässige Energieversorgung sicherstellte und eine optimale Anzahl von Beobachtungsmöglichkeiten bot. Aufgrund seiner sonnensynchronen Umlaufbahn überflog er einen bestimmten Ort zur gleichen Ortszeit. Dies minimierte die Auswirkungen tageszeitlicher Schwankungen und war der Schlüssel zur Gewinnung von Daten über einen längeren Zeitraum, wie sie z. B. für die Vorhersage von Ernten benötigt werden. Der Satellit befand sich selten in Finsternis und konnte jederzeit Daten erfassen. Die absteigende Äquatorialüberquerung für eine Umlaufbahn von der Morgendämmerung bis zur Abenddämmerung dauerte 6 Stunden. Seine Umlaufzeit betrug 100,7 min, der Wiederholzyklus 24 Tage.
RADARSAT konnte auf jeder 100,7-minütigen Umlaufbahn bis zu 28 Minuten Daten erfassen. Die Daten wurden in Echtzeit an Empfangsstationen am Boden weitergeleitet oder auf dem bordeigenen Aufnahmegerät gespeichert, bis RADARSAT in Reichweite einer Empfangsstation war. In kritischen Situationen konnten die Daten innerhalb von 4 Stunden nach der Erfassung verarbeitet und übermittelt werden.
Radarsat arbeitete mit einem aktiven Mikrowelleninstrument, einem C-BandSAR. Dieses schickte gepulste Signale mit Einfallswinkeln zwischen 20 und 60° zur Erde und verarbeitete die reflektierten und dann empfangenen Signale. Die Verarbeitung der Daten erzielte Auflösungen zwischen 30 und 600 m.
Das Haupteinsatzgebiet lag in den Polarregionen. Die Anwendungsbereiche umfassten Meereis-Monitoring (tägliche Eiskarten, Schutz der Ölplattformen vor Neufundland), Kartographie, Hochwasserkartierung und Katastrophenmonitoring allgemein, Gletschermonitoring, Waldflächenkartierung, Ölfleckenüberwachung, Aufspüren von möglichen Rohstofflagerstätten, Stadtplanung, Erntevorhersagen, Überwachung von Küstenerosion, Aufspüren von seismologisch oder vulkanologisch bedingten Oberflächendeformationen.
RADARSAT-1 stellte im März 2013 nach 17 Jahren Dienst aufgrund eines Defekts seine Arbeit ein. Die Datenkontinuität wird durch den Start von RADARSAT-2 im Dezember 2006 gewährleistet.
Seit dem 1. April 2019 stehen Bilder des Satelliten RADARSAT-1 der kanadische Weltraumbehörde CSA zur freien Verfügung. Diese können unter https://www.eodms-sgdot.nrcan-rncan.gc.ca/sp-pe.html heruntergeladen werden.
Discover how RADARSAT scans Earth's surface Quelle: ESA earth online
RADARSAT-2 ist eine gemeinsam finanzierte Satellitenmission der Canadian Space Agency (CSA) und MacDonald Dettwiler Associates Ltd. (MDA). Der Satellit startete am 14. Dezember 2007 an Bord einer Sojus-FG-Rakete von Starsem vom Kosmodrom Baikonur in Kasachstan und ist weiterhin in Betrieb (2024).
Als Nachfolgemission von RADARSAT-1 verfügt er ebenfalls über einen Synthetic Aperture Radar-Sensor (SAR) mit verschiedenen Polarisationsmodi. Unter anderem können im voll-polarimetrischen Modus Daten der vier Kanäle HH, HV, VV sowie VH gleichzeitig aufgezeichnet werden. Die höchste geometrische Auflösung des Satelliten liegt bei 3 m, wobei die Lagegenauigkeit 100 m beträgt. Es können Daten mit einer Schwadbreite von bis zu 500 km erfasst werden. Als aktiver Sensor sendet das SAR von RADARSAT-2 einen Mikrowellenenergieimpuls (C-Band bei einer Frequenz von 5,405 GHz) zur Erde, auch misst das SAR die Energiemenge, die von der Erdoberfläche zum Satelliten zurückreflektiert wird. Das SAR sendet und empfängt Signale zur Erfassung hochwertiger Bilder der Erde bei Tag und Nacht und unter allen Wetterbedingungen.
RADARSAT-2 befindet sich in 798 km Flughöhe auf der gleichen sonnensynchronen Umlaufbahn wie RADARSAT-1, mit einem Abstand von 30 Minuten (und mit der gleichen Bodenspur und dem gleichen Wiederholungszyklus wie RADARSAT-1).
Daten des Satelliten können für eine Vielzahl von Anwendungsbereichen eingesetzt werden, unter anderem zur Landnutzungskartierung, Meereiskartierung, Schiffsüberwachung sowie zum Gewässermonitoring und zur Hochwasserkartierung. Weitere Anwendungsbereiche sind die Eisüberwachung, die Forstwirtschaft, die Topographie, das Katastrophenmanagement und auch militärische Aufgaben.
RADARSAT ist Teil des ESA-Programms "Third Party Missions", in dessen Rahmen die ESA eine Vereinbarung zur Förderung der kostenlosen Verfügbarkeit von Datensammlungen für Forschung und Anwendungsentwicklung getroffen hat.
Bezeichnung für Satelliten, die mit Radarinstrumenten verschiedener Bauart ausgestattet sind und entsprechend unterschiedliche Aufgabenbereiche abdecken. Eine Reihe von Erdbeobachtungssatelliten, wie RADARSAT, setzen ein Radar mit synthetischer Apertur (SAR) ein, um Informationen über das Gelände und die Landbedeckung der Erde zu erhalten.
Erdbeobachtung
Bei der satellitenbasierten Radarfernerkundung werden elektromagnetische Impulse von satellitengestützten Sensoren ausgesandt, die dann die von der Erdoberfläche zurückgestreute Strahlung aufnehmen und verarbeiten. Dabei werden verschiedene Frequenzen (X-Band, C-Band oder L-Band) für unterschiedliche Anwendungsbereiche genutzt. Dieses aktive Verfahren ermöglicht die Erdbeobachtung zu jeder Tageszeit und unter allen Wetterbedingungen. So werden – unabhängig von Beleuchtung oder Bewölkung – unter anderem Konturen sichtbar und die Distanz errechenbar (über die Zeit, die zwischen Senden und Empfangen vergeht).
Die aufgezeichneten Signale stellen eine komplexe Kombination aus Rückstreuintensität und Wellenphasen dar. Diese lassen nicht nur Rückschlüsse auf die Eigenschaften der Erdoberfläche (Rauigkeit, Feuchtigkeit) zu, sondern ermöglichen auch die Erfassung der Geländehöhe. Die Radarinterferometrie umfasst verschiedene Messverfahren zur vergleichenden Analyse von Bildpaaren und Zeitreihen.
Die klassische differentielle SAR-Interferometrie nutzt Aufnahmen von zwei Zeitpunkten, um Höhenänderungen der Erdoberfläche zu erfassen. Mit den fortgeschrittenen Methoden der interferometrischen Stapelung können Überwachungsaufgaben auch durch die Analyse von Daten ganzer Zeitreihen erfüllt werden. Nach der Reduzierung von Interferenzen ist es möglich, Bodenbewegungen im cm- bis mm-Bereich zu erkennen.
Radarsensoren können je nach Wellenlänge auch durch hohen Pflanzenbewuchs bis in den Boden dringen, wie bei dem links abgebildeten Satelliten Sentinel 1 mit dem sogenannten C-Band Wellenbereich. Dadurch können u.a. Veränderungen der Oberfläche – speziell Bewegungen – im Zentimeter- und sogar im Millimeterbereich wahrgenommen werden.
Die Radartechnologie kann insbesondere für folgende Anwendungen einen Beitrag leisten: Eisbeobachtungen in den Polarregionen, vulkanische Aktivitäten, Erdbeben, Erdrutsche, Überschwemmungen, das Aufspüren von Bodensenkungen und -hebungen sowie das Beobachten von Meeresoberflächen, um Behinderungen durch Meereis und Ölverschmutzungen frühzeitig zu erkennen.
Monitoring von Landveränderungen mit Sentinel-1
Sentinel-1 sendet aktiv Radarwellen aus und empfängt anschließend das von der Erdoberfläche zurückgestreute Echo.
ein Windscatterometer zur Messung von Windgeschwindigkeit und -richtung
Nach Seasat mit seinem allerersten weltraumgestützte Radarsystem mit synthetischer Apertur (SAR) für wissenschaftliche Anwendungen.wurden SARs, Höhenmesser und Scatterometer auf vielen weiteren Weltraummissionen eingesetzt.
Vorteile von Radarsatelliten am Beispiel der militärischen SAR-Lupe-Konstellation
Die fünf Satelliten der SAR-Lupe-Konstellation sind baugleich und umkreisen seit Dezember 2007 die Erde auf einer mittleren Bahnhöhe von 500 Kilometern auf polnahen Umlaufbahnen. Als Nutzlast tragen die Satelliten ein SAR, das die Aufnahme hochauflösender Bilder von nahezu jedem Ort der Erde erlaubt. Anders als bei optischen Systemen hängt die Aufnahmefähigkeit der Satelliten dabei kaum von Wetter- oder Lichtverhältnissen ab. Da Radarsatelliten aktiv elektromagnetische Impulse aussenden, die von Trübungen der Atmosphäre nur wenig beeinflusst werden, liefern sie auch bei Dunkelheit und durch eine dichte Wolkendecke hindurch zuverlässig Bilder. Zudem werden Radarimpulse von Wasser und Metall besonders gut reflektiert, wodurch Infrastruktur, Fahrzeuge und Waffensysteme besonders gut erkannt werden können. In einigen Fällen können sogar durch Bäume, Tarnnetze und die oberste Bodenschicht hindurch Aufnahmen gemacht werden. Ein weiterer Vorteil von Radarsatelliten ist, dass diese auch die Bewegungsgeschwindigkeit von Objekten und Höhenunterschiede im Gelände präzise erfassen können.
Eine Besonderheit der SAR-Lupe-Satelliten ist die Möglichkeit zur Durchführung unterschiedlicher Flugmanöver in Abhängigkeit vom Einsatzszenario: Im sogenannten Strip-Map-Modus nehmen die Satelliten im Überflug (Geschwindigkeit über dem Boden etwa sieben Kilometer pro Sekunde) große Flächen mit moderater Auflösung auf. Diese Bilder liefern in erster Linie einen Überblick über eine gegebene Situation. Zur genauen Beobachtung besonders interessanter Ziele kann von allen Satelliten zusätzlich das sogenannte Spot-Light-Manöver durchgeführt werden. Bei diesem dreht sich der Satellit beim Überflug über das anvisierte Ziel, wodurch er seine Eigenbewegung teilweise kompensiert, die Beleuchtungszeit steigt und in Flugrichtung deutlich höhere Auflösungen erreicht werden können. Eine Drehung des gesamten Satelliten ist notwendig, da die Radarantenne unbeweglich angebracht ist. Die Ausrichtung und Stabilisierung der Satelliten während der verschiedenen Manöver wird durch Reaktionsräder realisiert, die vorhandenen chemischen Triebwerke dienen in erster Linie der Orbitalkontrolle.
Bilderzeugung am Boden
Die SAR-Lupe-Satelliten selbst erzeugen keine für Menschen interpretierbaren Bilder. Die aufgezeichneten Informationen werden lediglich als Rohdaten der Radarechos in Form von Zahlenkolonnen erfasst, auf den Satelliten gespeichert und bei der nächsten Gelegenheit an das Bodensegment in Deutschland übermittelt. Erst durch die Weiterverarbeitung der Rohdaten am Boden entstehen Bildprodukte, die von geschultem Personal analysiert und interpretiert werden können. (OHB 2023)
Engl. radar shadow, franz. ombre de radar; in der Radarfernerkundung informationslose Bereiche, also Bereiche ohne Signal, die in Entfernungsrichtung (von der Antenne abgewandt) hinter einem Objekt auftreten, das seine Umgebung überragt. Radarschatten erscheinen in Radarbildern sehr dunkel.
DIN 18716 definiert: Ein "informationsloser dunkler Bereich eines Radarbildes, der entsteht, wenn von der Antenne abgewandte Geländeflächen stärker geneigt sind als die Radarwellenfront".
Engl. radar sensor, franz. capteur radar; Mikrowellenimpulse aussendendes und empfangendes Instrument, welches bei der Radarfernerkundung eingesetzt wird. Man unterscheidet bildformende/-gebende und profilschreibende Sensoren.
Engl. radar backscatter; die von einem Objekt rückgestreute und von einem Empfänger aufgenommene Mikrowellenstrahlung eines Radarsystems. Die Grauwerte in einem Radarbild sind proportional zu der von einem Objekt empfangenen Radarrückstreuung. Objekte mit starker Reflexion zurück zum Sensor erscheinen hell, Objekte mit geringerer Reflexion dunkler. Das Ausmaß der Rückstreuung hängt von den Objekteigenschaften ab, (geometrische Form, Oberflächenrauigkeit, lokaler Einfallswinkel, Dielektrizitätskonstante) sowie von den Sensoreigenschaften (Wellenlänge/Frequenz, Einfallswinkel, Polarisation, Beobachtungsrichtung).
Engl. radar system; bei Radarsystemen handelt es sich um aktive Fernerkundungsverfahren, d.h. die verwendete elektromagnetische Strahlung wird vom Aufnahme-System selbst erzeugt. Dabei handelt es sich stets um Mikrowellenstrahlung einer bestimmten Frequenz im Bereich zwischen etwa 1 und 100 cm Wellenlänge. Die Daten-Aufnahme ist deshalb unabhängig von den naturgegebenen Strahlungsverhältnissen und - da die Mikrowellen Wolken, Dunst und Rauch durchdringen - auch unabhängig von der jeweiligen Wetterlage. Radarsysteme erfassen und lokalisieren ausgestrahlte und reflektierte Strahlung, womit sie Höhen messen und Geländebilder erzeugen.
Abbildende Radar-Systeme erstellen durch Abstrahlung und Empfang von Mikrowellenstrahlung Reflektivitätskarten des bestrahlten Teils der Erdoberfläche. Typischerweise werden in der Fernerkundung Mikrowellen im X-Band mit ca. 3 cm Wellenlänge, im C-Band mit ca. 6 cm oder im L-Band mit ca. 24 cm eingesetzt. Es werden aber auch Experimentalsysteme mit anderen Wellenlängen betrieben. Für Wellenlängen ab dem Zentimeter-Bereich ist der Transmissiongrad der Erdatmosphäre sehr hoch. Mikrowellenstrahlung mit einer Wellenlänge von größer als 1 cm kann kleine Wassertropfen beinahe ungehindert durchdringen. Daher werden Radar-Systeme von Wolken, Nebel und Regen kaum beeinträchtigt. Da Radar-Systeme die Erdoberfläche aktiv bestrahlen, können sie unabhängig von externen Beleuchtungsquellen, und somit unabhängig von der Tageszeit betrieben werden. Aufgrund dieser Eigenschaften sind Radar-Systeme vor allem in Gebieten mit regelmäßiger Wolkenbedeckung oder langer Dunkelheit, wie sie beispielsweise in tropischen bz. in polaren Regionen anzutreffen sind, gegenüber optischen Sensoren klar im Vorteil.
Die Wellenlänge bzw. Frequenz der verwendeten Mikrowellenstrahlung wird durch die technischen Einzelheiten des Systems definiert. Üblich, aber ohne einheitliche Festlegung ist die Kennzeichnung einzelner Wellenbereiche durch Buchstaben. Die in der FE am häufigsten verwendeten Frequenzbereiche sind:
Häufige Frequenzbereiche in der Fernerkundung
Ka-Band
λ ≈ 0,7 - 1 cm
f ≈ 30 - 40 GHz
X-Band
λ ≈ 2,4 - 4,5 cm
f ≈ 7 - 12 GHz
C-Band
λ ≈ 4,5 - 7,5 cm
f ≈ 4 - 7 GHz
L-Band
λ ≈ 15 - 30 cm
f ≈ 1 - 2 GHz
P-Band
λ ≈ 60 - 300 cm
f ≈ 0,2 - 0,5 GHz
Die Unterschiede sind deshalb wichtig, weil die Wechselwirkung zwischen der Strahlung und den Materialien an der Erdoberfläche in den einzelnen Wellenlängenbereichen sehr unterschiedlich ist.
Die folgende Abbildung skizziert die Funktionsweise eines einfachen Radarsystems. Im Flugzeug wird ein kombinierter Sender/Empfänger mitgeführt, dessen seitlich blickende Antenne schräg nach unten gerichtet ist. Sie ist so konstruiert, dass sich die in einem Bruchteil einer Sekunde ausgestrahlten Mikrowellen in einen sehr schmalen, aber langen Raumwinkel hinaus senkrecht zur Flugrichtung ausbreiten. Zu einem bestimmten Zeitpunkt erreicht die Front der ausgesandten Wellen ein bestimmtes Flächenelement F des Geländes. Von diesem wird die auftreffende Mikrowellenstrahlung teilweise reflektiert; ein mehr oder weniger großer Anteil der reflektierten Strahlung kehrt zurück zur Antenne und wird dort als Signal empfangen und registriert. Da die von den Mikrowellen bestrahlte Fläche über das Gelände hinwegwandert, können die Reflexionssignale von einem schmalen Geländestreifen nacheinander erfasst und als Bildzeile aufgezeichnet werden. Durch die Vorwärtsbewegung des Flugzeugs entsteht dann - wenn die Folge von Senden und Empfangen systematisch wiederholt wird - eine vollständige zeilenweise Bildaufzeichnung eines neben dem Flugzeug verlaufenden Geländestreifens.
Die Blickrichtung wird in der Radarfernerkundung gewöhnlich als Entfernungsrichtung (engl. range) bezeichnet. Ein nach diesem Prinzip arbeitendes System wird Seitensichtradar (engl. Sidelooking Airborne Radar oder SLAR) genannt.
Schematische Darstellung der Radar-Aufnahme
Die durch Aussendung einer einzelnen Wellenfront und den Empfang der reflektierten Signalfolge S entstehende Bildzeile ist als Grauwertprofil dargestellt.
Quelle: Albertz 2007
Solche Systeme (auch als Systeme mit Realer Apertur genannt) sind nur für geringe Flughöhen geeignet, bei denen die Entfernung zwischen Antenne und Gelände nicht zu groß ist.
Um in Flugrichtung eine höhere Auflösung zu erreichen und insbesondere die Aufnahme von Radarbildern auch von Satelliten aus möglich zu machen, müssen Radar-Systeme mit Synthetischer Apertur (engl. Synthetic Aperture oder SAR) eingesetzt werden. Dabei wird nur eine kurze Antenne verwendet, welche die Mikrowellenimpulse in einer breiten Keule mit dem Öffnungswinkel γ abstrahlt. Während des Fluges werden die einzelnen Geländepunkte aber wiederholt bestrahlt. Dementsprechend tragen sie mehrfach zu den empfangenen Reflexionssignalen bei, welche dadurch in komplexer Weise miteinander korreliert werden. Bei der Verarbeitung können die Daten jedoch so behandelt werden, als würden sie von einzelnen Elementen eines sehr langen Antennenarmes stammen. Dadurch lassen sich Bilddaten mit hoher geometrischer Auflösung ableiten. Je weiter die Geländepunkte von der Antenne entfernt sind, desto häufiger werden sie abgebildet und desto länger ist die scheinbare (synthetische) Antenne. Dies führt dazu, dass die Auflösung Δx in der Flugrichtung entfernungsunabhängig wird.
Zur Wirkungsweise von Radar-Systemen mit synthetischer Apertur
Nahe gelegenen Geländepunkte (z. B. A) werden über eine kurze Strecke fortlaufend beobachtet, die wirksame Antennenlänge ist dann kurz (SAR-Antenne A). Weiter entfernte Punkte (z. B. B) werden über eine längere Strecke beobachtet, die wirksame Antennenlänge ist dann entsprechend länger (SAR-Antenne B).
Quelle: Albertz 2007
Die Art und Weise, wie die Erdoberfläche in Radar-Bildern wiedergegeben wird, hängt vom Zusammenwirken vieler Einzelfaktoren ab. Dabei handelt es sich um
Parameter des Aufnahmesystems, wie die Wellenlänge der Strahlung, ihre Polarisation und den Depressionswinkel, sowie um
Parameter der Geländeoberfläche, insbesondere die Oberflächenrauhigkeit, die Oberflächenform und die elektrischen Eigenschaften der Materialien.
Von Polarisation spricht man, wenn elektromagnetische Wellen nur in einer ausgezeichneten Richtung schwingen. Die von der Antenne abgestrahlten Mikrowellen können horizontal (H) oder vertikal (V) polarisiert sein. Beim Empfang kann das System wiederum auf horizontale oder vertikale Polarisation eingestellt sein. Dadurch sind vier Kombinationen der Polarisation ausgesandter und empfangener Mikrowellen möglich, nämlich HH, VV, HV und VH.
Aufnahme-Parameter in der Radartechnik
Von zwei parallelen Flugbahnen aus kann ein Geländestreifen in stereoskopischer Überdeckung aufgenommen werden. Ein Punkt des Geländes erscheint dann in den Bildern unter verschiedenen Depressionswinkeln.
Quelle: Albertz 2007
Als Depressionswinkel bezeichnet man in der Radartechnik den Winkel zwischen der Horizontebene des Aufnahmesystems und dem Strahl zum beobachteten Objekt. Der auch Einfallswinkel (incidence angle) genannte Winkel wirkt sich unmittelbar auf die Auflösung des Systems quer zur Flugrichtung aus und bestimmt die Bestrahlungsstärke der Geländeoberfläche. Außerdem steht er in engem Zusammenhang mit der Geometrie der Abbildung und der Möglichkeit, Stereobildstreifen aufzunehmen.
Die Oberflächenrauigkeit hat großen Einfluss auf die Reflexionscharakteristik einer Fläche. Ist sie im Vergleich zur Wellenlänge der Strahlung gering, dann werden die Mikrowellen gespiegelt; zum System kehrt dann praktisch kein Signal zurück, so dass solche Flächen im Radarbild dunkel erscheinen.
Reflexion von Mikrowellen an Oberflächen verschiedener Rauigkeit
Links: Spiegelnde Reflexion an einer im Verhältnis zur Wellenlänge glatten Fläche (z. B. Sand)
Rechts: Diffuse Reflexion an einer rauhen Fläche (z. B. Felsbrocken).
Quelle: Albertz 2007
Liegt die Rauigkeit dagegen in der Größenordnung der Wellenlänge, so wirkt die Fläche als diffuser Reflektor. Mischformen der Reflexion sind häufig.
Die jeweilige Oberflächenform führt dazu, dass manche Flächen der schräg einfallenden Mikrowellenstrahlung zugewandt sind und deshalb stärker bestrahlt werden, während die abgewandten Flächen nur geringe Bestrahlung erfahren. Im Bild erscheint deshalb die Geländefläche je nach ihrer Exposition in bezug auf das Radarsystem heller oder dunkler. Wenn eine systemabgewandte Fläche steiler geneigt ist als der Depressionswinkel, dann erhält sie überhaupt keine Bestrahlung. Das Radarbild zeigt dann völlig informationslose tiefe Schlagschatten, sog. Radarschatten.
Als Besonderheit der Radar-Aufnahme treten Rückstrahl-Effekte auf, und zwar wenn benachbarte horizontale und vertikale Flächen zum Sensor hin orientiert sind und spiegelnd reflektieren.
Rückstrahl-Effekt bei der Aufnahme von Radarbildern
Durch zweimalige Spiegelung wird die Mikrowellenstrahlung genau in Richtung auf den Sensor reflektiert. Im Bild entsteht ein heller, überstrahlter Fleck.
Quelle: Albertz 2007
Von großem Einfluss auf die Ausbreitung der Mikrowellen und damit auf das Reflexionsvermögen sind die elektrischen Eigenschaften der Materialien an der Erdoberfläche. Besonders starke Reflexion tritt an metallischen Strukturen (z.B. Zäune, Masten von Hochspannungsleitungen u.ä.) auf. Andere Materialien mit hoher Dielektrizitätskonstante (z.B. feuchte Böden) reflektieren stark, und die Strahlung dringt nur wenig in das Material ein. Mit abnehmender Dielektrizitätskonstante (z.B. mit abnehmender Bodenfeuchte) wird auch das Reflexionsvermögen geringer, die Eindringtiefe nimmt jedoch zu. Das zu beobachtende Reflexionssignal hängt demnach von einer mehr oder weniger dicken Oberflächenschicht ab und mag deshalb auch Informationen zu vermitteln, die z.B. mit optischen Sensoren nicht erfassbar sind.
Die Wechselwirkung zwischen der Mikrowellenstrahlung und den Materialien an der Erdoberfläche ist kompliziert, die Interpretation von mit Radar-Systemen gewonnenen Bildwiedergaben entsprechend schwierig.
Für den Satelliteneinsatz kam von Beginn an nur das SAR-Verfahren in Frage. Experimentellen Charakter hatte noch sein Einsatz im Satelliten Seasat (1978) und ab 1981 in mehreren Space-Shuttle-Flügen mit dem Shuttle Imaging Radar (SIR). Kontinuität setzte mit den europäischen FE-Satelliten ERS (1991/5), ENVISAT (2002) und dem kanadischen RADARSAT ein. Die ERS waren mit den SAR-Systemen AMI ausgestattet, ENVISAT mit der Weiterentwicklung ASAR und RADARSAT trägt ein SAR-System, das in verschiedener Weise betrieben werden kann.
Der Einsatz des INSAR während der Shuttle Radar Topography Mission erlaubte die Erstellung eines weltweiten digitalen Geländemodells. Radarsatelliten wie der ERS-1 werden auch zur Eisbergwarnung eingesetzt. Eine Beschränkung stellt allerdings die Wiederholrate der Überflüge dar, die etwa bei 1 Woche liegt. Das deutsche Bundesamt für Seeschiffahrt und Hydrographie verwendet z.Z. SAR-Daten des ERS-2 aus der Quicklook-Kette operationell zur Eiswarnung. Der dänische Eisdienst verwendet RADARSAT-Daten. Eine Schwadbreite von ca. 500 km ermöglicht eine tägliche Abdeckung.
Engl. radio occultation; eine Fernerkundungs-Messtechnik zur Sondierung planetarer Atmosphären unter Benutzung phasentreuer Radiosignale, die sich durch die Atmosphäre von einem Sender zu einem Empfänger ausbreiten. Sowohl Sender als auch Empfänger befinden sich während der Messphase außerhalb der zu sondierenden Atmosphäre.
Die Durchführung der Messung erfordert eine spezielle Geometrie des Raumfahrzeugs zur Empfangsstation, wobei das Raumfahrzeug während der Messung aus Sicht des Empfängers hinter dem Planeten verschwindet und somit in Okkultation geht. Während der Radiostrahl vom Weltraum oberhalb der Atmosphäre zu einem Punkt in die Atmosphäre läuft, findet eine kontinuierliche Aufzeichnung der Beobachtungsdaten statt. Das sondierte Medium wirkt in charakteristischer Weise auf das Radiosignal und verändert dessen Phase, Amplitude und Polarisation. Die Signalbeeinflussung durch das Medium erzeugt einen zeitabhängigen Datensatz, der dem Höhenprofil des Brechungsindex entspricht. Dieses Profil der Neutral-Atmosphäre ist für Gasgemische proportional zur Dichte, woraus sich mit der hydrostatischen Grundgleichung und dem idealen Gasgesetz Höhenprofile von Druck und Temperatur der Neutral-Atmosphäre berechnen lassen. Aus der Proportionalität der Elektronendichte zum Höhenprofil des Brechungsindex sind zusätzlich Aussagen über die Elektronendichte der Ionosphäre möglich.
Wenn Radiookkultations-Missionen mit Funksignalen von GPS-Satelliten oder generell von Navigationssatelliten arbeiten, benutzt man den Begriff GPS-RO bzw. GNSS-RO (Global Navigation Satellite System-Radio Occultation). Derartige Messungen können auch von Flugzeugen oder von hohen Berggipfeln aus durchgeführt werden.
Beispielsweise nutzte CHAMP die Signale der GPS-Satelliten zur Temperatur- und Wasserdampfmessung an täglich über 200 global verteilten Orten von der Erdoberfläche bis in 40 km Höhe. Die Signale werden dabei immer dann aufgezeichnet, wenn die GPS-Satelliten aus dem Blickwinkel von CHAMP am Erdhorizont verschwinden. Beim Durchlaufen der Atmosphärenschichten werden die Wege der GPS-Signale abhängig von Temperatur und Wasserdampfgehalt gekrümmt. Aus der präzisen Messung einer Serie von Brechungswinkeln während der GPS-Radiookkultation können mit mathematischen Verfahren die Atmosphäreneigenschaften mit hoher Genauigkeit berechnet werden.
Die CHAMP-Messungen schließen Lücken im globalen meteorologischen Beobachtungsnetz für Wettervorhersage und Klimaforschung, besonders über unzugänglichen Regionen der Erde, wie z.B. über den Ozeanen oder Polargebieten. Im Vergleich dazu ist die Stationsverteilung für den Start von Wetterballonen sehr ungleichmäßig. Die GPS-Radiookkultationstechnik ermöglicht im Gegensatz zu anderen Satellitenmethoden insbesondere die Erfassung von Klimatrends, die durch langfristige Veränderungen von Temperatur und Wasserdampf in verschiedenen Atmosphärenschichten über verschiedenen Regionen der Erde charakterisiert werden. Die Daten von CHAMP sind dabei der Beginn eines Datensatzes, der von einer Reihe anderer, 2006 gestarteten Satelliten fortgesetzt wird (U.S.-taiwanesische Mehrsatellitenmission FORMOSAT-3/COSMIC, europäischer MetOp).
Beispiele für klimarelevante Messungen von CHAMP sind globale Verteilungen des Wasserdampfes als wichtigstem Treibhausgas und der Tropopausenhöhe. Die Tropopause kennzeichnet die Obergrenze der erdnächsten Atmosphärenschicht, der Troposphäre, in der sich alle Wetterereignisse abspielen. Wissenschaftliche Studien zeigen, dass eine klimatische Erwärmung der Troposphäre zu einer größeren Tropopausenhöhe führt. Vieles deutet zurzeit darauf hin, dass Veränderungen in der Tropopausenregion ein klareres Klimasignal enthalten als Messungen an der Erdoberfläche.
Radiookkultationsdaten der deutschen ErdbeobachtungssatellitenTerraSAR-X und TanDEM-X, die gegenwärtig vom GFZ analysiert werden, gehen Tag für Tag in die globalen Vorhersagen von Wetterzentren ein. Sie zählen zu den wichtigsten und genauesten Beobachtungen. Auch die Daten der deutsch-amerikanische Satellitenmission GRACE-FO werden entsprechend verarbeitet.
Die Messungen des SAPOS-Stationsnetzes werden für regionale Vorhersagen, beispielsweise von Niederschlägen genutzt. Es gibt kein anderes Verfahren für die Wasserdampfbeobachtung, das die notwendigen Informationen in besserer räumlicher und zeitlicher Auflösung über Deutschland zur Verfügung stellen kann als GNSS mit den SAPOS-Bodenstationen.
GPS Radio-Okkultation
Niedrigfliegende Satelliten empfangen GPS-Signale, welche die Atmosphäre durchquert haben. Daraus lassen sich die Temperaturschichtung und die Höhe von Druckflächen sehr genau berechnen.
Beispielsweise nutzte CHAMP die Signale der GPS-Satelliten zur Temperatur- und Wasserdampfmessung an täglich über 200 global verteilten Orten von der Erdoberfläche bis in 40 km Höhe. Die Signale werden dabei immer dann aufgezeichnet, wenn die GPS-Satelliten aus dem Blickwinkel von CHAMP am Erdhorizont verschwinden.
Beim Durchlaufen der Atmosphärenschichten werden die Wege der GPS-Signale abhängig von Temperatur und Wasserdampfgehalt gekrümmt. Aus der präzisen Messung einer Serie von Brechungswinkeln während der GPS-Radiookkultation können mit mathematischen Verfahren die Atmosphäreneigenschaften mit hoher Genauigkeit berechnet werden.
Titanatmosphäre Die Raumsonde Voyager 1 stellte mit Hilfe der Radio-Okkultation beim Saturnmond Titan die Dichte, die chemische Zusammensetzung und die Höhe seiner Atmosphärenschichten fest.
Bestimmung des Durchmessers von Titan Auch der Monddurchmesser konnte mit Hilfe der Okkultationsmethode bestimmt werden. Die hohe Opazität (Undurchsichtigkeit) der Atmosphäre machte eine optische Bestimmung des Monddurchmessers mit der Kamera nicht möglich, jedoch konnte durch die Zeit, die vom Verlöschen des Signals an einer Seite des Mondes bis zum Wiederauftauchen des Signals an der gegenüberliegenden Mondseite verging, sein Durchmesser errechnet werden.
GPS-Radiookkultation Der deutsche Geoforschungssatellit CHAMP (2000-2010) beobachtete die Signale von GPS-Satelliten kurz vor oder nach ihrer Okkultation durch die Erde. Aus dem Vergleich mit den Werten, die von einem Satelliten ohne atmosphärische Störungen zu erwarten wären, lassen sich Aussagen über Wassergehalt und Temperatur der Atmosphäre ableiten.
Von der z.B. an Satelliten ankommenden Strahlung wird immer nur ein kleiner Teil gemessen, bestimmt durch die Eigenschaften des Radiometers wie Wellenlänge, Raumwinkel und Blickrichtung. Daraus ergibt sich, dass für verschiedene Messaufgaben Radiometer mit ganz verschiedenen, jeweils optimierten Eigenschaften eingesetzt werden.
Sie können auch dazu verwendet werden, die Emissionsspektren verschiedener Chemikalien zu erfassen und so Daten über die chemischen Konzentrationen in der Atmosphäre zu liefern.
Wettersatelliten tragen Radiometer um die Strahlung von Schnee, Eis, Wolken, Wasserkörpern, der Erdoberfläche und der Sonne zu messen. Damit wird der Flüssigwasser- und Wasserdampfgehalt der Atmosphäre ermittelt. Auch werden die Messungen dazu verwendet, Altimeterdaten zu korrigieren, beispielsweise durch die Messung der reflektierten Strahlung von der Meeresoberfläche. Abbildende Radiometer vermögen ihre gescannten Informationen in einem zweidimensionalen Pixelmuster anzuordnen, das dann für eine bildhafte Darstellung verwendet wird.
Radiometer haben einen weit gefassten Einsatzbereich. Sie werden verwendet, um Wald-, Busch- und Kohlefeuer aufzuspüren, sie erkennen Vulkanausbrüche aus dem All, und sie bestimmen die Bodenfeuchte und die Reaktion von Pflanzen auf die gegebenen Verhältnisse. Ferner überwachen sie die Dynamik von Ökosystemen und analysieren Energieströme über Land und von Meeresoberflächen. Radiometer werden auch nachts eingesetzt, da künstliche Lichtemissionen eine wichtige Signatur menschlicher Aktivitäten sind. Zu den Anwendungen gehören in diesem Kontext die Fernerkundung der Bevölkerung, des BIP und der Schäden an der Infrastruktur durch Kriege oder Katastrophen.
Eine ganzjährige Satellitenüberwachung der Eisausdehnung beruht auf Mikrowellen-Signalen. Passive Mikrowellen-Sensoren (ESMR, SMMR, SSM/I, und AMSR-E) liefern seit 30 Jahren Daten über die Meereisflächen unserer Erde aus dem All. Satellitengestützte Mikrowellenradiometer sind wichtige Instrumente für die Fernerkundung von Meereis und stellen ohne Zweifel die „Arbeitstiere“ unter den Satelliten in dieser Disziplin dar.
Bezeichnung für die Messung elektromagnetischer Strahlung und ihre Anwendung in Physik, Astronomie und Geophysik. Sie ist mit der Photometrie verwandt und stellt die Erweiterung dieser „Messung des Lichts“ in die Bereiche des Infraroten und Ultravioletten, aber auch der Gammastrahlen dar.
Engl. radiometric resolution, franz. résolution radiométrique; Maß für die kleinste mit einem Fernerkundungssystem noch unterscheidbare elektromagnetische Strahlung, in Abhängigkeit von der betrachteten Wellenlänge und vom Detektorsystem. Die Erkennbarkeit von Objekten hängt auch von der Fähigkeit eines Sensors ab, die empfangene Strahlung möglichst differenziert aufzuzeichnen. Durch die Anzahl der sog. Grauwerte, die die Zahl der Intensitätsstufen kennzeichnet, die für die Wiedergabe dieser Rückstrahlung pro Kanal zur Verfügung stehen, wird die radiometrische Auflösung bestimmt.
Demnach gibt radiometrische Auflösung Auskunft über die Anzahl der Grauwertabstufungen, die das Aufnahmesystem in jeder einzelnen Filmschicht bzw. in jedem Kanal erfassen kann. Allerdings ist dies eine vereinfachte Darstellung.
Übertragen auf die Alltagserfahrung und eingeschränkt auf das sichtbare Licht heißt dies: Die radiometrische Auflösung gibt an wie gut kleine "Helligkeitsunterschiede" innerhalb einer Aufnahme wahrgenommen werden können und sie gibt die mögliche Größe der digital numbers (DN) in einem Kanal an. Die digital numbers werden von 0 bis 2x-1 angegeben. Der Bereich stimmt überein mit der Anzahl der Bits, die gebraucht werden, um den Zahlenwert in das binäre Format zu codieren (1 bit = 21 = 2). Der Maximalwert für die Darstellung einer Energiemenge ist durch die Anzahl der Bits definiert. Die Daten der meisten digitalen Aufnahmesysteme (Scanner) weisen eine radiometrische Auflösung von 8 bit auf. Bei Bilddaten photographischer Systeme geht man von etwa 6 bit (also etwa 64 Grauabstufungen) aus.
Insgesamt wird die radiometrische Auflösung bestimmt durch das Signal-Rausch-Verhältnis, den Dynamikbereich und die Quantisierung.
Bits und Grauwerte
Die radiometrische Auflösung von Bilddaten der Fernerkundung gibt an, wie gut man Grauwerte voneinander unterscheiden kann. Ihre Einheit heißt Bit. Je mehr Bit ein Bild hat, um so mehr Grauwerte können gespeichert und um so mehr Unterschiede im Reflexionsverhalten der Landoberfläche können festgestellt werden.
Bei einer 8-Bit Darstellung (28), der z. Z. gebräuchlichsten Form, können die DN Werte zwischen 0 und 255 annehmen. Die Daten der Satelliten ERS-1/-2 sind in 16-Bit kodiert, das bedeutet die DN liegen zwischen 0 und 65535. Je feiner die Unterscheidung zwischen den geringsten und den höchsten Helligkeitswerten ist, umso besser kann die Aufnahme interpretiert bzw. klassifiziert werden.
Ältere Systeme können lediglich 64 Helligkeitsstufen bzw. Grauwertabstufungen (entspricht 6 bit) unterscheiden, wobei mit neueren Systemen 2048 Helligkeitsstufen (z.B. 11 Bit bei IKONOS) erreicht werden oder sogar 12 bit (212 oder 4096 Grauwerte) bei flugzeuggestützten Multispektralsensoren wie HRSC-AX oder DMC.
Zu den radiometrischen Eigenschaften zählen:
Rauschen: sind statistische Schwankungen von Messdaten. Die Leistungsfähigkeit eines Sensors ist abhängig vom Signal/Rausch-Verhältnis.
Kalibrierung: Es besteht ein Zusammenhang zwischen den Messdaten und den beobachteten physikalischen Größen. Optimale Sensorauslegung auf projektierten Anwendungszweck.
Spektrale Auflösung: Anzahl der Spektralkanäle, Bandbreite der Kanäle
Konsequenzen für Bildauswertung: die radiometrische Genauigkeit ist bei photographischen Verfahren gering; allerdings ist sie hoch bei Abtastaufnahmen (Scannersysteme)
Engl. radiometric transformation; nach DIN 18716 die "Veränderung der radiometrischen Eigenschaften eines Bildes, wobei seine geometrischen Eigenschaften weitgehend erhalten bleiben". Der Definition ist folgende Anmerkung beigefügt: "Die radiometrischen Eigenschaften werden durch die Strahldichte physikalisch definiert und durch die Grauwerte der Bildpixel in den Spektralkanälen charakterisiert".
Engl. image restoration; syn. radiometrische Verbesserung, Beseitigung von während der Datenaufnahme oder -übertragung aufgetretenen radiometrischen Bildfehlern durch Atmosphärenkorrektur bzw. Beleuchtungskorrektur. Radiometrische Korrekturen verbessern die Bildqualität und gleichen Farbübergänge zwischen benachbarten Bildausschnitten aus. Es werden also Effekte kompensiert oder zumindest reduziert, die nicht objektspezifisch sind und sich den eigentlichen Objektinformationen in störender Weise überlagern.
Die am Sensor empfangene Strahlung wird durch verschiedene Faktoren wie Beleuchtungsunterschiede, atmosphärische Einflüsse, Blickwinkel oder Charakteristika des Sensors selbst modifiziert. Ob radiometrische Korrekturen, d.h. Korrekturen der empfangenen Reflexionswerte, vorgenommen werden müssen, hängt von der Anwendung ab:
Eine multitemporale Auswertung der Daten, wie sie z.B. im Rahmen eines regelmäßigen Monitorings einer Region notwendig ist, erfordert die Minimierung externer Einflüsse, um die eigentlich interessierenden, zeitspezifischen Unterschiede zu erkennen.
Bei einer Mosaikbildung aus mehreren Bilddatensätzen, die auch von verschiedenen Sensoren stammen oder zu unterschiedlichen Zeitpunkten aufgenommen sein können, ist es notwendig, die Grauwerte über die verschiedenen Teilbilder hinweg homogen abzubilden, d.h. vergleichbar zu machen (sog. Histogram Matching).
Soll ein Vergleich mit am Boden durchgeführten Reflexionsmessungen durchgeführt werden oder sind Aussagen über absolute Reflexionswerte gefragt, muss zunächst eine Kalibrierung der Grauwerte in absolute Strahlungseinheiten erfolgen, wie sie am Sensor gemessen werden.
Für eine Konvertierung der Grauwerte in absolute Reflexionsbeträge sind aktuelle Kalibrierungsinformationen für jeden Kanal eines Sensors notwendig, da sich diese Werte mit fortschreitender Alterung der Aufnahmeinstrumente ändern. Diese Daten sollten dem Dateianfang des Bilddatensatzes (engl. header) oder beiliegenden Zusatzinformationen entnommen werden können.
Erst durch eine sensorspezifische Kalibrierung ist der Vergleich von Aufnahmen verschiedener Sensoren möglich.
Verfahren der Navigation, die auf dem Empfang von Radiosignalen beruhen. Zu unterscheiden sind satellitengestützte und bodengebundene Verfahren. Wichtigste Verfahren der Satellitennavigation sind das Global Positioning System und GLONASS. Die bodengebundenen Verfahren haben mit dem Aufkommen der Satellitennavigation weitgehend an Bedeutung verloren, da sie hinsichtlich Reichweite und Genauigkeit beschränkt sind.
Ein (meist) Ballon-getragenes, mit Telemetrie ausgestattetes Instrumentenset aus der Aerologie zur direkten Messwertnahme meteorologischer Parameter von der Erdoberfläche bis in eine Höhe von ca. 30 km und zur unmittelbaren Datenübermittlung. Entsprechend setzt sich auch der Name aus zwei Teilen zusammen, 'Radio-' (engl. für Funkgerät) und -'sonde', der Bezeichnung für die Messfühler.
Radiosonden messen Höhe, Druck, Temperatur, relative Luftfeuchtigkeit, Wind (sowohl Geschwindigkeit als auch Richtung) und die kosmische Strahlung in großer Höhe. Eine Klasse von Radiosonden, deren Position während des Aufstiegs in der Atmosphäre über ihre Radarreflektoren verfolgt wird, um die Windgeschwindigkeit und -richtung zu ermitteln, wird als Rawindsonde bezeichnet, was eine Abkürzung für Radarwindsonde ist. Eine andere Klasse von Radiosonden sind jene, die von Flugzeugen abgeworfen werden und fallen, anstatt von Wetterballons getragen zu werden. Diese Klasse von Radiosonden wird als Dropsondes bezeichnet. Radiosonden spielen eine wichtige Rolle bei den meisten Formen der operationellen atmosphärischen Datenassimilation.
Ein wichtiges Merkmal der verschiedenen Arten von Radiosonden ist, dass die Beobachtung möglicherweise nicht an einem Modell- oder Analyserasterpunkt stattfindet und daher, wie bereits erwähnt, eine Interpolation vom Modell zum Ort der Radiosondenbeobachtung vorgenommen werden muss.
Die Radiosonde wurde 1927 von R. Bureau und P. A. Moltschanoff erfunden. Schon in den folgenden Dekade entstand vor allem in Europa und den USA ein Radiosondenmessnetz, mit dessen Messwerten Höhenwetterkarten erstellt wurden.
Bedeutung
Die Geschichte und die besonderen Überlegungen zur Verwendung von Radiosondenbeobachtungen für die Validierung und Kalibrierung von Satelliteninstrumenten verdeutlichen die Bedeutung dieser Instrumente. Radiosonden spielen eine wesentliche Rolle bei der Validierung weltraumgestützter Beobachtungen von Temperatur, Feuchtigkeit, atmosphärischen Bewegungsvektoren und sogar Oberflächenwinden durch hyperspektrale Infrarot- und Mikrowellenradiometer. Mit dem Aufkommen weltraumgestützter Wind-Lidars spielen sie auch eine wichtige Rolle bei der Validierung satellitengestützter Windprofilbeobachtungen.
Numerische Wettervorhersagemodelle spielen ebenfalls eine wichtige Rolle bei der Validierung und Kalibrierung weltraumgestützter Beobachtungen, benötigen aber eine Verankerung, die unter anderem durch Radiosondenbeobachtungen gewährleistet wird.
Radiosonde
Radiosonde mit integriertem GPS-Empfänger aus dem Jahr 2008.
Links die quadrifilare Helixantenne für GPS-Empfang, rechts als silbernes Metallband der Temperaturfühler und darunter der Sensor zur Luftfeuchtigkeitsmessung.
Die Bedeutung von Radiosonden liegt in der direkten Art der Datengewinnung, ein Vorteil gegenüber anderen Verfahren, die überwiegend aus der Ferne, z.B. von Wettersatelliten aus arbeiten. Nur mit einer Radiosonde kann die Atmosphäre mit ausreichender Höhenauflösung und Genauigkeit vermessen werden, um ein genaues Bild über deren aktuellen Zustand zu erhalten. Nachteilig ist die Winddrift, die eine Abweichung vom Startpunkt bis zu 300 km bewirken kann. Andererseits kann aus dem Windversatz der Radiosonde indirekt der Höhenwind bestimm werden.
Die Praxis
Radiosondenaufstiege werden i.a. zweimal täglich weltweit durchgeführt (üblicherweise 0000 und 1200 UTC). Ungefähr 800 der mehr als 2.800 IGRA-Stationen die sich am diesbezüglichen Programm Integrated Global Radiosonde Archive (IGRA) beteiligen, melden derzeit (2021) Daten. Die vertikale Ausdehnung sowie die zeitliche und vertikale Auflösung variieren ebenfalls zwischen den Stationen und im Laufe der Zeit. Das IGRA wird vom National Climatic Data Center der NOAA betrieben. Es verfügt über 28 Mio qualitätsüberprüfte Radiosondenbeobachtungen über einen Zeitraum von 1938 bis 2005.
Der mit 4 m3 Wasserstoff gefüllte Gummi-Ballon (800 g) trägt die 30 m unter dem Ballon angebrachte Instrumentenkapsel (650 g) mit einer definierten Steiggeschwindigkeit von ca. 300 m pro Minute. Während des Aufstieges werden über die Messfühler ständig Messwerte genommen und über die Sendeeinheit per Funk an die Bodenempfangsstation übertragen. Die Instrumente messen Temperatur (Bimetallthermometer), Luftfeuchte (Haarhygrometer), Luftdruck (Aneroidbarometer), ferner Taupunktunterschreitung, geopotentielle Höhe, sowie die verstrichene Zeit seit dem Start. Durch Verfolgung der Sonde mit Theodoliten, mittels Radar oder mit Hilfe von GPS kann auch der (Höhen-)Wind bestimmt werden. Für die Radar-Verfolgung wird ein zusätzlicher Reflektor an der Sonde angebracht.
Der Flug der Radiosonde kann mehr als zwei Stunden dauern, und während dieser Zeit kann die Radiosonde auf über 35.000 m aufsteigen und mehr als 200 km vom Startpunkt entfernt driften. Während des Fluges ist die Radiosonde Temperaturen von bis zu -92°C und einem Luftdruck ausgesetzt, der nur ein paar Hundertstel dessen beträgt, was an der Erdoberfläche vorherrscht.
Mit dem Aufstieg dehnt sich der Ballon wegen des abnehmenden Luftdrucks aus. Bei Erreichen der maximalen Höhe platzt der Ballon (Rekord im Bereich des DWD bei ca. 39 km bzw. 2,5 hPa), und die Instrumentenschachtel aus Styropor schwebt an einem Fallschirm zur Erde zurück. Etwa 25 % der Instrumente werden gefunden (Vergütung für die Finder) und erneut eingesetzt.
Ballone, die keine Instrumente, sondern lediglich einen Radar-Reflektor tragen, nennt man Pilotballone. Sie dienen zur Erfassung des vertikalen Windprofils. Die Wolkenuntergrenze kann man bestimmen, indem man das Verschwinden des Ballons in der Wolke beobachtet. Ferner kommen Spezialradiosonden zum Einsatz, zu denen Ozonsonden mit optischen oder elektrochemischen Sensoren sowie Strahlungssonden zählen.
Radiosondenaufstieg
Ein typisches Radiosondenaufstiegsgespann besteht aus einem mit Wasserstoff gefüllten Gummiballon (spezieller Latex mit 0,05 - 0,1 mm Wandstärke), einem Papierfallschirm, ggf. einem Radarreflektor (mit Reflektorfolie bespanntes Pappkreuz) und der Radiosonde mit ggf. GPS-Empfänger. Alle Teile sind durch Schnüre verbunden, wobei sich die Radiosonde ca. 30 m unter dem Ballon befindet.
Der Einsatz von Radiosonden wird zwar den in situ-Methoden zugerechnet, mit ihrer Funktion der bodengestützten Bahnverfolgung zur Bestimmung des Höhenwindfeldes besitzt sie aber auch eine Fernerkundungskomponente. Ein weiterer Bezug zur Fernerkundung besteht in der Nutzung der Radiosondendaten zur unerläßlichen Kalibrierung und Validierung von z.B. Satellitendaten.
Radiowellen, auch Funkwellen oder Hertzsche Wellen sind Wellen die eine Länge zwischen nicht ganz einem Millimeter und mehr als einem Kilometer liegen. Aufgrund der Transparenz der Atmosphäre in diesem Bereich wird dies auch als Radiofenster bezeichnet, was eine Beobachtung der Erdoberfäche aus dem Weltraum ermöglicht. Dies gilt natürlich auch für andere Fensterbereiche. Die Frequenzbänder P, L, S, C, X, K bezeichnen für Radargeräte genutzte Frequenzbereiche, deren kryptische Bezeichnung aus dem 2. Weltkrieg stammt. Neben aktiven Systemen wie Radar und Altimeter werden auch passive Radiometer (z.B. zur Messung der Bodenfeuchte oder der Salinität) in diesem Frequenzbereich genutzt.
Im Ultrakurzwellenbereich (Wellenlängenintervall 0,1-1 m) hängt die Ausbreitung der Radiowellen von den physikalischen Eigenschaften der unteren Atmosphäre ab. Die Refraktion dieser Wellen wird von der vertikalen Temperatur- und Feuchteverteilung bestimmt. Wenn man diese Zusammenhänge nutzt, kann man aus den Empfangsbedingungen eines definierten Senders auf Elemente des Aufbaus der Atmosphärische Grenzschicht und zum Teil auch der Troposphäre schließen.
Radiowellen im Kurz-, Mittel- und Langwellenbereich (Wellenlängenintervalle 10-30.000 m) werden zur Sondierung der Ionosphäre eingesetzt. Neben speziellen Impulssendern, die die Bestimmung der Höhe der ionisierten Schichten gestatten, werden auch Radiowellen genutzt, die von kommerziellen Radiosendern ausgestrahlt werden. Damit kann man mit drei geeignet angeordneten Empfängern die Phasenverschiebungen der an einer ionosphärischen Schicht reflektierten Radiowellen messen und so unter bestimmten Voraussetzungen auf die Windverhältnisse in der Höhe der erfassten Schichten schließen.
Gewittertätigkeit kann global aus der Registrierung von Atmospherics (kurz auch Sferics) überwacht werden. Darunter versteht man die im Langwellenbereich bemerkbare Impulsstrahlung, die von elektrischen Entladungen in der Atmosphäre ausgeht.
Akronym für Radar-Online-Aneichung; Bezeichnung für ein Routineverfahren des Deutschen Wetterdienstes (DWD) zur Analyse der Niederschlagshöhen aus radar- und stationsbasierten Messungen im Echtzeitbetrieb.
RADOLAN liefert aus der Kombination der punktuell an den Niederschlagsstationen gemessenen stündlichen Werten mit der Niederschlagserfassung der 17 Wetterradare flächendeckende, räumlich und zeitlich hoch aufgelöste quantitative Niederschlagsdaten im Echtzeitbetrieb für Deutschland. Dieses Verfahren wurde in Kooperation des DWD mit der Bund/Länder-Arbeitsgemeinschaft Wasser (LAWA) entwickelt und befindet sich seit Juni 2005 im operationellen Routinebetrieb.
Mit Radar kann der bodennahe Niederschlag nicht direkt gemessen werden, sondern nur die von den Hydrometeoren in der Atmosphäre reflektierten Signale. Zur quantitativ korrekten radargestützten Niederschlagsanalyse ist daher eine Aneichung mithilfe von Niederschlagsmessern (Ombrometern) am Erdboden notwendig. Neben den eigenen Stationen werden hierfür auch von anderen Messnetzbetreibern die Niederschlagsdaten verwendet.
Angeeichte Radarniederschlagsdaten stellen eine Synthese aus den beiden Datenquellen Radar- und Bodenmessnetz dar und kombinieren die Vorteile beider Messtechniken.
Der Nutzer kann auf unterschiedliche RADOLAN-Produkte zurückgreifen (s. Kurzbeschreibung und Produktübersicht). Das bestmögliche Produkt ist ein Deutschlandkomposit mit stündlichen Niederschlagshöhen in einer Intensitätsauflösung von 0,1 mm und einer räumlichen Auflösung von 1 km², welches im Echtzeitbetrieb innerhalb von 30 Minuten verfügbar ist. Seit dem 25. April 2018 werden diese stündlichen Niederschlagshöhen alle zehn Minuten berechnet.
RADOLAN-Produkte werden als Eingangsdaten für Anschlussverfahren genutzt. Dazu gehören z. B. das quantitative RADAR-Nowcasting (s. RADVOR) und das numerische DWD-Wettervorhersagemodell COSMO-DE zur zeitnahen Niederschlagsvorhersage sowie das radargestützte DWD-Unwetterwarnsystem KONRAD (KONvektionsentwicklung in RADarprodukten).
Einrichtung zum Start von Raketen, hier speziell von Trägerraketen, stellt eine oder mehrere Abschussrampen und Startleitstände zur Kontrolle der Startprozedur zur Verfügung. Für Flüssigkeitsraketen sind auch Anlagen zur Lagerung und ggf. Erzeugung des flüssigen Treibstoffes nötig.
Ein Raketenstartplatz wird möglichst weit entfernt von menschlichen Siedlungen errichtet, um Gefahren für die Bevölkerung bei einer Explosion möglichst gering zu halten. Meist wird ein Standort am Meer gewählt, da das Meer eine exzellente leicht zu überblickende Sicherheitsfläche für den gefahrlosen Niedergang von Raketenteilen darstellt.
Raketenstartplätze von denen auch Satelliten und interplanetare Raumflugkörper gestartet werden, werden auch als Weltraumbahnhof bezeichnet. Die bekanntesten Raketenstartplätze sind Cape Canaveral in den USA, Baikonur in Russland und Kourou in Französisch-Guyana. Daneben gibt es noch zahlreiche weniger bekannte Raketenstartplätze.
In Europa sind ESRANGE bei Kiruna in Schweden und Salto di Quirra auf Sardinien die wichtigsten Raketenstartplätze. Deutschland hat zur Zeit (noch) keinen Raketenstartplatz, besaß aber seit 1936 dreimal einen und zwar von 1936 bis 1945 in Peenemünde, der hauptsächlich zur Erprobung (nicht zum militärischen Einsatz!) der A4/V2 diente, von 1957 bis 1964 im Wattengebiet von Cuxhaven, von den Ernst Mohr, die "Herrmann-Oberth-Gesellschaft e.V." und die "Berthold-Seliger-Forschungs- und Entwicklungsgesellschaft mbH" diverse Raketen, wie die Kumulus und die Cirrus starteten und auf der Halbinsel Zingst an der Ostseeküste, wo sich von 1988 bis 1992 ein Startplatz für russische MMR06-M Raketen befand. Polen startete in den 70er Höhenforschungsraketen vom Typ Meteor von Truppenübungsplätzen in der Nähe von Leba und Ustka.
Engl. Raman scattering; die inelastische Streuung von Licht an Atomen oder Molekülen. Das emittierte Streulicht ist bei der Raman-Streuung spezifisch und besitzt eine höhere oder niedrigere Frequenz als die des einfallenden Lichtstrahls. Der Anteil des frequenzverschobenen Lichtes ist um einen Faktor 103 bis 104 geringer als der des elastisch gestreuten Lichtes, welches als Rayleigh-Streuung bezeichnet wird.
Ein Random Forest (dt. etwa „zufälliger Wald“ oder „Zufallswald“) ist ein Klassifikations- und Regressionsverfahren, das aus mehreren unkorrelierten Entscheidungsbäumen besteht. Der Algorithmus ist relativ einfach und erzielt in kurzen Trainingszeiten gute Lernergebnisse. Den Begriff Random Forest prägte im Jahr 1999 Leo Breiman, der verschiedene Methoden zur Randomisierung von Entscheidungsbäumen entwickelte.
Random Forest wird häufig im Machine Learning verwendet. Es zählt zu den überwachten Lernverfahren (Supervised Learning) und nutzt die Ergebnisse einer Vielzahl verschiedener Entscheidungsbäume, um bestmögliche Entscheidungen oder Vorhersagen zu treffen. Die Entscheidungsbäume wurden nach einem Zufallsprinzip unkorreliert erstellt. Jeder Baum trifft für sich einzelne Entscheidungen. Aus der Menge der Einzelentscheidungen liefert der Algorithmus eine endgültige Entscheidung. Random Forests können auch zur Regression eingesetzt werden.
Entscheidungsbäume und Bagging
Die Basis für Random Forest bilden viele einzelne Entscheidungsbäume (Decision Trees). Ein einzelner Baum besteht aus mehreren Verzweigungen. Die Verzweigungen entstehen, indem Daten aufgrund ihrer Eigenschaften mithilfe von Regeln einer Klasse zugeordnet werden. Ausgehend von der ersten Entscheidung entstehen immer mehr Verzweigungen, bis eine bestimmte Ergebnisebene erreicht ist. Jeder einzelne Entscheidungsbaum in einem Random Forest hat für sich gesehen nicht den Anspruch, jedem Datensatz die korrekte Klasse zuzuweisen.
Der Begriff Bagging
Dabei ist „Bagging“ ein Kunstwort, das sich aus den Worten „bootstrapping“ und „aggregating“ zusammensetzt. Es meint eine bestimmte Methode, die Einzelvorhersagen verschiedener Klassifizierungsmodelle (im Fall eines Random Forest die Entscheidungsbäume) zu kombinieren. Die Einzelergebnisse der Entscheidungsbäume gehen mit einer vorgegebenen Gewichtung in das Gesamtergebnis ein.
Die Auswahl der einzelnen Bäume erfolgt zufällig nach einem Verfahren, das in der statischen Methodenlehre unter „Bootstrapping“ bezeichnet wird. Dabei werden aus der Menge aller Trainingspixel wiederholt Zufallsstichproben gezogen, wobei ein Pixel in mehreren oder sogar in keiner Stichprobe auftreten kann. Dies entspricht dem Ziehen von nummerierten Kugeln aus einer Urne, die nach der Ziehung wieder zurückgelegt werden.
Random Forest in der Fernerkundung
Nach der Trainingsphase des Klassifikationsverfahrens Random Forest, d.h. der verschiedenen Entscheidungsbäume für die Trainingspixel, durchläuft ein neues Pixel alle Entscheidungsbäume. Jeder Baum liefert für dieses Pixel eine Klassenzuordnung. Somit hat bei k Bäumen jedes Pixel k Zuordnungen. Am Ende führt eine Auswertung dieser (vorläufigen) Zuordnungen zur endgültigen Klassifizierung. Dem Pixel wird die Klasse zugewiesen, die am häufigsten gewählt wurde.
Vorteile von Random Forest gegenüber anderen Klassifikationsmethoden
Der Klassifikator trainiert sehr schnell: Dieser Vorteil ergibt sich durch die kurze Trainings- bzw. Aufbauzeit eines einzelnen Entscheidungsbaumes und dadurch, dass die Trainingszeit bei einem Random Forest linear mit der Anzahl der Bäume steigt.
Die Evaluierung eines Testbeispieles geschieht auf jedem Baum einzeln und ist daher parallelisierbar. Er evaluiert also schnell.
Er ist sehr effizient für große Datenmengen (viele Klassen, viele Trainingsbeispiele, viele Merkmale).
Wichtige Klassen können erkannt werden.
Der Zusammenhang zwischen Klassen kann erkannt werden.
Nachteile von Random Forest
Im Bereich der Echtzeitentscheidungen und -vorhersagen ist Random Forest nur bedingt einsetzbar.
Die Vorhersagen und Entscheidungen beanspruchen bei einer großen Anzahl verschiedener Entscheidungsbäume eine größere Zeit. In vielen Echtzeitanwendungen werden daher andere Verfahren genutzt.
Kommerzieller Anbieter (RapidEye AG, ab 2013 BlackBridge AG, seit Juli 2015 durch die Übernahme von Blackbridge im Besitz von Planet Labs) von hochwertigen Fernerkundungsdaten und Geoinformations-Dienstleister, dessen Unterstützung von Management- und Entscheidungsprozessen auf eigenen Erdbeobachtungbildern basiert. RapidEye leitet die gleichnamige Satellitenmission (RapidEye Constellation) in nationaler und internationaler Kooperation. Die seit März 2020 inaktive RapidEye Konstellation besaß Aufgaben zu Kartographie, Landoberflächen (z.B. Ermittlung von Ernteschäden), digitalen Geländemodellen, Katastrophenmanagement, Umweltmonitoring, 3D-Visualisierung.
Die ursprünglich in privat-öffentlicher Partnerschaft konzipierte zivile Mission arbeitet mit einem Finanzeinsatz von ca. 160 Millionen €. 15 Mio € Fördermittel kamen von Seiten des DLR, 10 % der Gesamtsumme vom Bundesministerium für Wirtschaft und Technologie.
Das Satellitensystem wurde seit 1996 von dem Münchner Raumfahrtunternehmen Kayser-Threde basierend auf Ideen des DLR als Leitprojekt zur Kommerzialisierung der Raumfahrt und als Teil des neuen Deutschen Raumfahrtprogramms entwickelt.
Das Kamerasystem (Jena Spaceborne Scanner, JSS-56), der Mission wurde von dem Thüringer Unternehmen Jena-Optronik GmbH entwickelt und gebaut, welches im Jahr 2004 den Auftrag über die Entwicklung und Herstellung von MacDonald Dettweiler and Associates Ltd. (MDA), dem kanadischen Hauptauftragnehmer der Firma RapidEye AG, erhielt. Die britische Firma Surrey Satellite Technology Ltd (SSTL) baute die Satelliten.
Am 29. August 2011 übernahm das kanadische Unternehmen Iunctus Geomatics die RapidEye AG. Der Hauptsitz befindet sich - nach vorübergehendem Standort in Brandenburg an der Havel - seit Dezember 2012 am Kurfüstendamm, Berlin. Der Firmenname wurde am 6. November 2013 in BlackBridge AG umbenannt um den Marktauftritt aller BlackBridge-Firmen zu vereinheitlichen. Im Juli 2015 übernahm Planet Labs die Fa. BlackBridge und damit auch RapidEye.
Die inzwischen inaktive RapidEye Konstellation bestand aus 5 Satelliten, die sonnensynchron in ca. 630 km Höhe die Erde in ungefähr gleichen Abständen umliefen. Die etwa kühlschrankgroßen Satelliten auf Basis des Satellitenbus MicroSat-100 haben eine Masse von ca. 156 kg und wurden gemeinsam am 29. August 2008 an Bord einer russisch/ukrainischen Dnepr-1-Trägerrakete vom Raketenstartplatz Baikonur (Kasachstan) in den Weltraum gebracht und nacheinander ausgesetzt. Ihre vorgesehene Lebensdauer betrug 7 Jahre, letztlich waren sie von 2009 bis 2020 in Betrieb.
Das optische System lieferte mit Hilfe von fünf Zeilenscannern mit jeweils 12.000 Pixeln multispektrale Bilder in fünf Bändern innerhalb des Wellenlängenbereichs von 440 nm bis 850 nm. Die Downloadübertragungsrate im X-Band betrug mehr als 80 Mbps (Telemetrie Downlink 9,6 kBit/s, Control Uplink: 38,4 kBit/s). Die Sensoren waren quer zur Flugrichtung um bis zu 25 Grad in beide Richtungen schwenkbar. Dies ermöglicht die Aufnahme eines Gebietes aus verschiedenen Sichtwinkeln. Aus den resultierenden stereoskopischen Aufnahmen lassen sich digitale Geländemodelle ableiten. Die Sensoren konnten bis zu 77 km breite Bildstreifen (Schwadbreite) mit einer maximalen Länge von 1.500 km aufzeichnen. Dabei betrug die geometrische Auflösung in jedem Kanal 6,5 Meter pro Pixel.
Jedes Gebiet der Erde sollte innerhalb von weniger als fünf Tagen überflogen werden können. Das bedeutete im Einzelfall, dass durch die Möglichkeit des Schwenkens der Satelliten und die Tatsache, dass es sich um fünf baugleiche Satelliten handelte, es möglich war, jeden Punkt der Erde jeden Tag zu erreichen. Hochaufgelöste Fotos mit einer Detailgenauigkeit von fünf Metern lassen sich beispielsweise in topographische Karten mit einem Maßstab von bis zu 1:25.000 umsetzen. Multitemporale Bilddaten gaben unter anderem über Wachstumsentwicklungen auf Ackerbauflächen Aufschluss oder ermöglichen feldgenaue Kartierungen von Unwetterschäden. Die Satelliten tragen Namen griechischen Ursprungs: Choma (Erde), Tachys (schnell), Mati (Auge), Trochia (Orbit) und Choros (All).
Letztes Tageslicht-Bild von Berlin (RapidEye 2020) Quelle: Planet
Anwendungsbereiche des RapidEye-Systems: Landwirtschaft: RapidEye ist in der Lage, auf regionaler wie globaler Ebene die landwirtschaftliche Überwachung von Feldern in regelmäßigen Abständen durchzuführen. Die Informationen, welche aus den Bildern abgeleitet werden können, unterstützen Landwirte bei Precision Farming, landwirtschaftliche Versicherer bei Schadensbewertung und Risikomanagement oder Regierungen bei der Nahrungsmittelversorgung und Überwachung des Umweltschutzes.
Forstwirtschaft: Satellitengestütze Informationen werden zunehmend von Regierungen und kommerziellen Betreibern verwendet, um z. B. den Waldzustand zu bewerten, die ökologische und ökonomische Nachhaltigkeit der Forstbetriebe zu messen und illegalen Holzeinschlag und Entwaldung zu überwachen.
Sicherheit und Katastrophenschutz: Zeitnahe Aufnahmen von Krisengebieten ermöglichen eine schnelle Schadensanalyse, was von wesentlicher Bedeutung für das Krisenmanagement der Behörden und der Koordination der Rettungskräfte ist.
Umweltschutz:Satellitenbilder können Behörden und Organisationen wertvolle Informationen liefern, um die ökologischen Auswirkungen menschlicher Einflüsse zu überwachen.
Räumliche Darstellung: RapidEyes Satellitenbilder werden als Hintergrund für eine Vielzahl von Anwendungen wie beispielsweise Kartographie, Navigations- und Flugsimulation, Gaming und als integraler Bestandteil in geospezifischen 3D-Modellierung verwendet.
Energie & Infrastruktur: Die RapidEye-Konstellation kann Pipelines, Übertragungsnetze und andere Infrastrukturen überwachen um Problemstellen zu identifizieren wie z. B. Eingriffe in die Vegetation, nah stehende Gebäude, Ausbau von Straßen oder Leckagen. Die Daten können zur Klassifizierung von Bodenbedeckung und Bodennutzung eingesetzt werden, um Telekommunikationsunternehmen bei der Planung ihres Funknetzes zu unterstützen.
Das RapidEye Science Archive (RESA) unterstützt wissenschaftliche Forschung und Entwicklung durch die Bereitstellung kostenloser Daten der Satellitenmissionen RapidEye, PlanetScope und SkySat der Firma Planet Labs (Planet). Der Betrieb des RESA erfolgt im Auftrag des DLR Raumfahrtmanagements mit Mitteln des BMWi.
Alle Forschungs- und Bildungseinrichtungen sowie Unternehmen und öffentliche Einrichtungen in Deutschland können Anträge zur Nutzung der o.g. Satellitenbilddaten für Forschungs- und Entwicklungsprojekte einreichen. An dem Programm können auch internationale Partner teilnehmen, sofern eine Kooperation mit einer deutschen Institution besteht und diese als Principal Investigator (PI) das Projekt leitet.
Die Entscheidung über die Bereitstellung von Satellitenbilddaten aus dem RESA erfolgt durch Planet in enger Absprache mit dem DLR Raumfahrtmanagement als Auftraggeber. Die Entscheidung wird spätestens nach fünf Arbeitstagen mitgeteilt.
Die Satellitenbilddaten von Planet werden in allen Bereichen der Erdbeobachtung eingesetzt. Die hohe zeitliche Auflösung der Daten ermöglicht detaillierte Einblicke in Veränderungen auf der Erdoberfläche:
PlanetScope erfasst einen Großteil der Erdoberfläche täglich in 3-4 m Auflösung.
Mit SkySat können kleinere Gebiete bis zu vier Mal am Tag in einer Bildauflösung von bis zu 72 cm aufgenommen werden.
RapidEye liefert multispektrale Aufnahmen im R,G,B,NIR and RedEdge Spektrum mit einer Bodenauflösung von 6.5 m von bis zu 5 Mio Quadratkilometern täglich.
Im Rahmen des RESA haben die Nutzer die Möglichkeit, auf folgende Daten zuzugreifen:
Archivierte Daten: RapidEye, Planetscope und SkySat Dabei steht das gesamte RapidEye-, PlanetScope-, und SkySat-Datenarchiv zur Verfügung, aus welchem im Umfang des genehmigten Datenkontingents bestellt werden kann. Im Online-Katalog PlanetExplorer können passende Archiv-Daten recherchiert und ausgewählt werden: https://planet.com/explorer
Neuaufnahmen: Sind die gewünschten Daten im Online-Katalog nicht verfügbar oder liegt Ihr Interessenszeitraum in der Zukunft, können RapidEye- und/oder SkySat-Daten individuell aufgenommen werden. Planet nimmt die Daten über Ihren Untersuchungsgebieten schnellstmöglich auf. Dafür ist aber ein Aufnahmefenster von 45 Tagen oder länger nötig. PlanetScope-Daten werden systematisch täglich aufgenommen, eine spezielle Beantragung ist hierfür nicht notwendig.
Engl. Akronym für Radio-Acoustic Sounding System, dt. Radio-Akustisches Sondierungs-System; Kombination von Windprofiler-Radargeräten mit auf Schallquellenbasis arbeitenden SODAR-Geräten zur Messung der Temperatur.
Die ausgesandten akustischen Wellen erzeugen Wellenfronten, die sich mit Schallgeschwindigkeit ausbreiten und die elektromagnetische Brechungsindexschwankungen in der Luft erzeugen, an denen die Radarwellen gestreut werden. Durch das Windprofiler-Radar lässt sich nun, analog zur Messung des Radialwindes, die Schallgeschwindigkeit bestimmen. Sie hängt direkt von der Temperatur ab, so dass daraus das vertikale Temperaturprofil abgeleitet werden kann.
Die vertikale Reichweite ist hierbei auf Grund der starken Schwächung der akustischen Signale jedoch deutlich geringer als bei der Windmessung. Je nach System werden im allgemeinen Messhöhen von 0,2 - 1 km (Grenzschichtwindprofiler) bzw. 0,5 - 4 km (Troposphären-Windprofiler) erreicht.
RASS
RASS-Kombination der Fa. Metek aus SODAR-Gerät und Erweiterung (Parabolantennen) zur Erstellung von Temperaturprofilen.
RASS
RASS-Kombination der Fa. Metek aus Drei-Komponenten-SODAR und Erweiterung zur Erstellung von Temperaturprofilen.
In diesem Kontext sind Raster digitale Bilder, die durch Luftfahrzeuge, Drohnen, Satelliten, Sensoren am Boden und im Wasser, digitale Bilder und gescannte Karten erfasst wurden.
In seiner einfachsten Form besteht ein Raster aus einer Matrix von Pixel (oder Zellen), die als Zeilen und Spalten (oder als Gitter) angeordnet sind, wobei jedes Pixel einen Wert enthält, der Informationen darstellt, z. B. die Bildreflexion oder die Temperatur.
Daten, die in einem Raster-Format gespeichert sind, stellen Ausschnitte der Wirklichkeit wie folgt dar:
Kontinuierliche Daten sind Spektraldaten, wie zum Beispiel Satelliten-, Luft- und Drohnenbilder, und physische und Umweltdaten, wie zum Beispiel Höhe und Temperatur.
Thematische Daten (auch diskontinuierliche Daten genannt) repräsentieren Features wie Landnutzung und Bodendaten.
Die Bilder können gescannte Karten oder Zeichnungen und Gebäudefotografien umfassen.
Engl. raster graphics (image), bitmap, syn. Rastergrafik, Pixelgrafik; Rasterdaten, die einen bildhaften Informationsgehalt (Bildinformation) in Form von computerlesbaren Daten haben. Das sind z.B. Satellitenbilder, gescannte Luftbilder, Karten oder Pläne, aber auch Ergebnisse einer Klassifizierung. Derartige Bilder besitzen eine rasterförmige Anordnung (Matrix) von Pixeln (Bildpunkten), denen jeweils eine Farbe zugeordnet ist. Die Hauptmerkmale einer Rastergrafik sind daher die Bildgröße (Breite und Höhe gemessen in Pixeln, umgangssprachlich (!) auch Bildauflösung genannt) sowie die Farbtiefe.
RGB-Rastergrafik
Links oben befindet sich ein Smiley als RGB-Rastergrafik (Bitmap). Rechts davon ist eine vergrößerte Darstellung. Jedes Quadrat stellt ein Pixel dar. Wenn noch weiter hineinzoomt, können die einzelnen Pixel analysiert werden, wobei deutlich wird, dass ihre Farben durch die Addition der Werte für Rot, Grün und Blau entstehen.
Engl. raster data; Datenart eines speziellen Datenmodells (Rasterdatenmodell) zur Verwaltung von Geometrie- und Sachdaten. Die dem Modell zugrunde liegende Rasterung beruht auf der Unterteilung einer Ausgangsfläche in Elemente bestimmter Größe. Es entsteht eine Matrix, ein Raster von Bildpunkten (Pixel). Dabei handelt es sich meist um Quadrate oder Rechtecke, aber bei Verwendung geographischer Koordinaten als Bezugssystem auch um Trapeze. Sie haben eine bestimmte Position im Bild und weisen eine einheitliche Flächenfüllung (Farb- oder Grauwert) auf. Die Rasterzelle wird als Träger der geometrischen (Transformation von Lagekoordinaten) aber auch thematischen Information (Attribute eines Objektes) benutzt.
Diese Information ist beispielsweise eine Höhenangabe, ein Schadstoffwert, ein Temperaturwert oder ein Farbwert eines digitalen Satellitenfotos. Rasterbilddaten entstehen etwa beim Scannen von Plänen oder Karten und in der Fernerkundung. Im Unterschied zu herkömmlichen Bildern weisen sie eine Georeferenzierung auf, d. h. eine räumliche Referenzinformation mit geodätischem Bezugssystem, die einmal zugeordnet und mit dem Kartenbild gespeichert wird.
Zum Datenaustausch von Rasterdaten existieren eine Vielzahl von Datenformaten, wobei die meisten zur Speicherung von digitalen Bildern konzipiert sind. Von diesen wiederum erlauben nur einige eine Georeferenzierung bzw. Geokodierung des Bildes (z.B. GeoTIFF, ESRI-GRID, ERDAS-IMG).
Rasterdarstellungen
Regelmäßige Raster als Dreiecks-, Vierecks- und Hexagonalraster
Da Rasterdaten für jedes Pixel einen bestimmten Wert wiedergeben, eignen sie sich im Gegensatz zu Vektordaten zur Darstellung von kontinuierlichen Daten, wie z.B. der Konzentration von Schadstoffen oder der Abhängigkeit einzelner Werte im Raum von der Entfernung einer emittierenden Quelle (Ausbreitungsberechnungen). So gehört die Modellierung von unscharfen Phänomenen zu ihren Stärken.
Rasterdaten I
Darstellung von Geländehöhen in einer Rasterdatenmatrix
Rasterdaten II
Darstellung der Schallausbreitung in einer Rasterdatenmatrix
Rasterdaten III
Prinzip der Überführung von Vektordaten in die Matrixstruktur von Rasterdaten
In der Kartographie spielen Rasterdaten gegenüber den Vektordaten eher eine untergeordnete Rolle. In den meisten Fälle werden Rasterdaten durch Scannen analoger Vorlagen (Karten, Luftbilder) gewonnen oder in Form von digitalen Aufnahmen sowie von Satellitenbilddaten übernommen. Ebenso finden Rasterdaten in der GRID-Datenstruktur im Digitalen Geländemodell Anwendung.
Darstellung von Objekten im Raster- und Vektorformat
Darstellung von Polygonen im Vektorformat
Darstellung von Linien im Vektorformat
Darstellung von Polygonen Im Matrixmuster des Rasterformats
Darstellung von Linien im Matrixmuster des Rasterformats
Mit Methoden der digitalen Bildverarbeitung können die Bildpunkte klassifiziert werden. Es bilden sich dann Flächen gleicher Klassen. Die Zuordnung zu bestimmten Sachdaten muss über eine Legende erkennbar gemacht werden.
Engl. raster data model; Datenmodell zur Verwaltung von räumlichen Daten (Geometriedaten) als eine Matrix von Zellen. Das Rastermodell spielt in der digitalen Bildverarbeitung eine zentrale Rolle. So wird die Geometrie in einem Rasterbild (z.B. in einem digitalenSatellitenbild oder nach der Erfassung eines Bildes mit einem Scanner) durch quadratische Bildelemente(Pixel, sog. picture elements) als feines, aber starres Raster von kleinen Flächen aufgelöst.
Die Rasterzelle (Pixel) dient als Träger der geometrischen und auch thematischen Information. Der Georaum unterliegt dabei einer regelmäßigen Unterteilung in Zeilen und Spalten. Das Raster benötigt lediglich Angaben bezüglich des Aufsatzpunkts, die Ausdehnung und die Richtung zur Georeferenzierung. Jedes Pixel erhält einen eindeutigen Wert, der als thematisches Attribut aufgefasst werden kann (z. B. die Höhe im Feld value eines digitalen Geländemodells). Alternativ kann dieser Wert auch als Schlüssel auf externe Daten verweisen. Auf diese Weise können Linien oder Flächen als Objekte gebildet werden, die aus einer Menge von Pixeln bestehen und diesen wiederum Sachdaten zugeordnet sind. In der Kartographie spielen Rasterdatenmodelle gegenüber den Vektordatenmodellen eher eine untergeordnete Rolle. In den meisten Fällen werden Rasterdaten als unstrukturierte Bilder durch das Scannen analoger Vorlagen (Karten, Luftbilder) gewonnen oder in Form von Satellitenbilddaten übernommen.
Datenmodelle und Wirklichkeit
Die Perzeption und Interpretation der „realen Welt“ sowie die Entwicklung geeigneter Strategien für den praxistauglichen Umgang mit dieser Welt, findet mit dem Hilfsmittel der Abstraktion und Kommunikation (= Modellbildung) statt.
In der Anwendung von GIS haben sich für die Modellierung räumlicher Daten zwei vollständig unterschiedliche Datenmodelle etabliert, die Raster- bzw. Vektordatenmodell genannt werden. Beide Datenmodelle sind prinzipiell sowohl für die kontinuierliche als auch die diskrete Raumrepräsentation verwendbar. In der Praxis werden jedoch kontinuierliche Daten gewöhnlich im Rasterdatenmodell und diskrete Daten im Vektordatenformat abgebildet. Beide Datenmodelle unterscheiden sich vorrangig in der Art der räumlichen Repräsentation ihrer Merkmale.
Quelle: Universität Marburg Geographie (R.o.)
Als Grundprobleme des Rastermodells gelten: Die geometrische Form der Geoobjekte wird durch die Rasterung verändert, gebogene Linien werden durch treppenförmige Rasterstrukturen angenähert, Form und Größe der Geoobjekte werden vergröbert. Stets werden Flächen betrachtet. Punkte wie auch Linien werden durch flächige Pixel dargestellt. Im Rückschluss bedeutet dies, dass ein einzelnes oder auch mehrere benachbarte Pixel, die im Rastermodell eine Fläche markieren, in der realen Welt auch Einzelpunkte oder Linien bedeuten können. Diese Schwierigkeiten können verringert, aber prinzipiell nicht behoben werden, indem die Maschengröße verkleinert wird. Hierdurch erhöht sich die Auflösung, wobei gleichzeitig die Größe der Rastermatrix und dadurch der notwendige Speicherplatz erheblich ansteigen. Die Genauigkeit einer Koordinatenangabe im Vektormodell wird aber nicht erreicht.
Engl. ratio calculation, Ratiobild; Verfahren zur Datenreduktion bei Fernerkundungsaufzeichnungen, welches durch Division Albedo- bzw. Beleuchtungsunterschiede unterdrückt. Die spektralen Eigenschaften verschiedener Oberflächenmaterialien treten hierbei in den Vordergrund. Auf diesen Ergebnisbildern können alle redundanten Informationen eliminiert und verdeckte Hinweise hervorgehoben werden.
Ratiobilder (engl. ratio image) werden erzeugt, indem die gesamten Intensitäten zweier SpektralkanälePixel für Pixel durcheinander dividiert werden. Die Grauwerte des neuen Bildproduktes stellen kein Maß für die Reflexionsintensität dar, sondern das Verhältnis der Helligkeit zweier Kanäle. Die Ratiobildung kann zu einer kontrastreicheren und informativeren Darstellung des Bildinhalts führen.
Nachteile dieser Methode sind die Verschlechterung des Signal-Rausch-Verhältnisses und eine mitunter aufwändige Erfassung des atmosphärischen Streulichtanteils in den einzelnen Bändern.
Im Allgemeinen wird die Ratiobildung auf zwei Bänder angewendet, wodurch die Interpretation des Spektralverhaltens erleichtert wird. Sie ist auch unabhängig von den unterschiedlichen Reflexionswerten der aufgezeichneten Region verwendbar. Beispielsweise werden benachbarte Szenen direkt kompatibel; auch multitemporal sind Vergleiche möglich. Im Gegensatz zu Ratiobildungen können bei der Hauptkomponententransformation beliebig viele Bändern miteinander verknüpft werden.
Die erstellten Ratiobilder können in Farbkompositen weiterverarbeitet werden oder auch als zusätzlicher Inputkanal in eine automatische, rechnergestützte Klassifikation einfließen. Ratiobilder finden vor allem in der Geologie verbreitete Anwendung, da sie manchmal geringfügige Reflexionseigenschaften von Materialien der Erdoberfläche verstärken können.
Raumbezug oder auch Georeferenz beschreibt die Lage eines Objektes in einem Bezugssystem. Einfache Daten werden durch ihren Raumbezug zu Geodaten. Dabei wird eine Unterscheidung zwischen direktem und indirektem Raumbezug vorgenommen. Von direktem Raumbezug spricht man, wenn Daten bestimmten Koordinaten zugeordnet werden können. Unter indirektem Raumbezug versteht man hingegen Informationen die keine dauerhaft festgelegten Koordinaten haben, wie z. B. Postleitzahlen.
Engl. spaceflight; Reisen oder Transporte in oder durch den Weltraum mit definierter Zielsetzung, nicht zu verwechseln mit der Luftfahrt, also dem Reisen durch die Erdatmosphäre. Diese klassische Trennung zwischen Luft- und Raumfahrt wird aber zunehmend durch die technische Entwicklung von suborbitalen Raumflugzeugen und Raketenflugzeugen aufgeweicht.
Man unterscheidet zwischen der bemannten Raumfahrt, bei der Menschen die Reise in den Weltraum antreten, und der unbemannten Raumfahrt, die lediglich Satelliten und Sonden in den Weltraum befördert.
Raumfahrt ist zu einem festen Bestandteil des Alltags und unverzichtbaren Instrument für Wirtschaft, Wissenschaft, Politik und Gesellschaft geworden. Raumfahrt leistet heute entscheidende Beiträge zur Förderung von Forschung und Entwicklung, Bildung und Innovation, zu Wachstum, zur Schaffung hoch qualifizierter Arbeitsplätze und zur Erhöhung der Lebensqualität, für den Schutz der Erde, für Sicherheit und Verteidigung und für die internationale Zusammenarbeit.
Als wohl wichtigste Aufgabe der Raumfahrt gilt die Beobachtung der Erde und ihrer Ökosysteme aus dem All. Denn sie ermöglicht es, Veränderungen von Landoberflächen, Ozeanen und Atmosphäre zu erkennen und Maßnahmen zum Schutz von Umwelt und Klima zu entwickeln.
Erdbeobachtungssatelliten verschaffen bei akuten Katastrophen wie etwa Erdbeben, Hochwasser oder Ölpest rasch einen Überblick. Ihre Aufnahmen zeigen das Ausmaß einer Katastrophe und deren Brennpunkte und unterstützen so Hilfsdienste vor Ort. Die Fernerkundung via Satellit ermöglicht die Erstellung digitaler Karten der Erdoberfläche sowie die tägliche Wettervorhersage und sichert damit beispielsweise den Flug- und Schiffsverkehr.
Die satellitengestützte Erdbeobachtung liefert zudem Entscheidungsgrundlagen für internationale Verträge wie etwa zum Schutz der Ozonschicht oder zum Kampf gegen die globale Erwärmung. Außerdem helfen sie, die Einhaltung solcher Verträge zu überwachen. Sie stellen Informationen für amtliche Stellen bereit, ermöglichen Biotopkartierungen, helfen bei der Optimierung landwirtschaftlicher Subventionen und bei der Planung von Mobilfunksystemen.
Raumstationen auf dem Mond, bemannte Flüge zum Mars - mit dem Artemis-Programm der NASA und den Projekten privater Raumfahrtunternehmen wie SpaceX oder Blue Origin verfolgt die weltweite Raumfahrt große Ziele.
Die Akteure
Die USA und Russland sind längst nicht mehr die einzigen Nationen, die mit großen Sprüngen in Richtung Weltall streben. Neben der Europäischen Union treiben auch China, Japan und Indien die Entwicklung von Trägerraketen, Satellitensystemen und Raumsonden zur Erforschung des Sonnensystems und der Erde voran. Daneben hat sich in den vergangenen Jahren eine weitere Akteursgruppe etabliert: finanzstarke privatwirtschaftliche Akteure (z. B. SpaceX, Blue Origin und Google in den USA), die in der Lage sind die zukünftige Entwicklungsdynamik der bemannten und unbemannten Raumfahrt zu prägen.
In Deutschland wird Raumfahrt unter politischen Gesichtspunkten als infrastrukturelle Dienstleistung zur Erreichung gesellschaftlicher, wirtschaftlicher und wissenschaftlicher Ziele begriffen. Erderkundungsmissionen müssen entweder in eine definierte Wertschöpfungskette eingebettet sein oder auf die Beantwortung grundsätzlicher wissenschaftlicher Fragestellungen abzielen.
Aufgrund ihrer Komplexität und hohen Kosten können die meisten Raumfahrtprojekte nur in internationaler Zusammenarbeit durchgeführt werden. Deutschland ist einer der 20 Staaten, die sich zu diesem Zweck in der Europäischen Weltraumorganisation ESA zusammengeschlossen haben.
Aktuell sieht sich die europäische Raumfahrt in einem Wandel von einer den Regierungen einiger weniger Raumfahrtmächte vorbehaltenen Domäne in einen Bereich, in dem sich zunehmend eine Vielzahl verschiedener Akteure weltweit engagieren; u. a. gehört dazu das Aufstreben von privaten Unternehmen, die Beteiligung von wissenschaftlichen Instituten, Industrie und Bürgern, die Digitalisierung und weltweite Interaktion.
Das Konzept „Raumfahrt 4.0“ steht für die Weiterentwicklung des Raumfahrtsektors hin zu einer neuen Ära, die sich durch neue Gegebenheiten auszeichnet und mittels eines Zusammenspiels von Regierungen, Privatsektor, Gesellschaft und Politik eingeleitet wird. Das Konzept „Raumfahrt 4.0“ lehnt sich an das Konzept „Industrie 4.0“ an, mit dem es dicht verwoben ist und das in den Bereichen Fertigung und Dienstleistung die vierte industrielle Revolution einläutet.
Überblick über die Weltraumwirtschaft
In der globalen Weltraumwirtschaft stellen die Satelliten-Dienste den größten Sektor dar (ca. 37 %), dicht gefolgt von der Bodeninfrastruktur. Die Erdbeobachtung ist der größte Nutzer der Herstellung von Satelliten und den zugehörigen Startdiensten, und sie bleibt ein wichtiger Motor für die gesamte Branche.
Weltraum-Hardware und Raumfahrtanwendungen sind wichtige Nutzer von Innovationen in Branchen außerhalb der Raumfahrtindustrie. Fortschritte in den Bereichen Fertigungstechnologien, Miniaturisierung, Nanotechnologie, künstliche Intelligenz und wiederverwendbare Trägersysteme haben die Verwerfungen auf dem Markt der Raumfahrtindustrie vorangetrieben, z.B. durch sinkende Kosten bei der Satellitenherstellung und bei Trägerraketen. Wissenschaftlicher und technologischer Fortschritt gehen Hand in Hand und können zu disruptiven Innovationen führen, was zu einem neuen Markt mit einem radikal anderen Wertschöpfungsangebot führt. Die Raumfahrt ist daher ein Wegbereiter für mehrere Industriezweige. Beispielsweise dienen weltraumgestützte Infrastrukturprojekte wie Galileo als Vorläufer für viele weltraumbezogene Anwendungen in Segmenten wie standortbezogene Dienste und Landwirtschaft. Auch wenn einige dieser Technologien mit der Raumfahrtindustrie um Investitionen konkurrieren, bietet die Raumfahrtindustrie in der Tat wichtige Anreize für andere Technologien.
Die folgende Abbildung zeigt eine vereinfachte "Landschaft" von Geschäftsmodellsegmenten (wie Satellitendienste und Bodenausrüstung, Satellitenherstellung, Trägerraketen-Industrie, nationale Sicherheit, Weltraumtourismus, Energie, Bergbau, Verarbeitung und Montage sowie bemannte und robotergestützte Weltraumwissenschaft und -exploration) und Unternehmensdienstleistungen (gelbe Kästen), zusammen mit ihren Interdependenzen, einer Klassifizierung hinsichtlich des Geschäftscharakters (B2B oder B2C) und der Implementierungszeitspanne.
Schema von Dienstleistungen im Raumfahrtsektor, Geschäftsmodellen und -segmenten Quelle: European Investment Bank 2019
Insgesamt sind die Aussichten für die künftige Entwicklung des Raumfahrtmarktes zwar positiv, wobei wachsende Investitionen aus privaten Quellen die zunehmende Attraktivität der kommerziellen Aspekte der Raumfahrt signalisieren, doch sind einige Marktsegmente und Geschäftsmodelle aufgrund der hohen Vorabinvestitionen, der unausgereiften Märkte und der hohen technologischen und regulatorischen Unsicherheit nach wie vor erheblich risikoreicher als andere. Am anderen Ende des Spektrums sind die Asset-light-Mehrwertdienste zum attraktivsten Geschäftssegment geworden, da sie die besten Marktchancen und das niedrigste Risiko bieten.
Während europäische Firmen bei vielen Innovationen, die sich auf die Raumfahrtindustrie ausgewirkt haben, wie z.B. Mikro- und Nanoelektronik, digitale Transformation und Konvergenz sowie optische und allgegenwärtige Kommunikation, wettbewerbsfähig bleiben, hat sich diese Führungsrolle selten in einen kommerziellen Vorteil innerhalb des Raumfahrtsektors umgesetzt. Einer der Gründe für diese Diskrepanz zwischen europäischer Innovation und Wettbewerbsvorteilen ist der Mangel an vorgelagerten Aktivitäten in Europa, da US-Firmen den vorgelagerten Sektor dominieren. Die europäischen Technologieführer sind selbst nicht aktiv genug im Weltraum, und der Technologietransfer ist nicht effektiv genug. Außerdem sind Risikokapitalmittel für Unternehmen, die ihre innovativen Technologien kommerziell verwerten wollen, nur begrenzt verfügbar. Die Knappheit der Scale-up-Finanzierung in Europa ist ein kritischer Mangel, der oft zu einer Flucht von Talenten und Unternehmen in die USA führt, wo die Finanzierungslandschaft derzeit günstiger ist. (EIB 2019)
In der Raumfahrtindustrie wird zwischen Upstream- und Downstreamsektoren unterschieden. Dem Upstreamsektor werden diejenigen Aktivitäten zugeordnet, die Objekte in den Orbit bringen sowie dort betreiben sollen (z. B. Satellitenproduktion, Trägersysteme, Raumfahrzeuge). Dem Downstreamsektor wird im Wesentlichen die kommerzielle Nutzung von Produkten und Dienstleistungen auf der Erde in den Bereichen satellitenbasierte Kommunikation, Navigation und Erdbeobachtung zugeschrieben.
Die US-amerikanische Perspektive
Die Vereinigten Staaten sehen sich in den 2020er Jahren in einer Phase des strategischen Wettbewerbs mit China und Russland. Die USA gehen davon aus, dass dabei militärische Macht allein die Schlachten der Zukunft nicht gewinnen wird. Es ist eher die Kombination aus überlegener amerikanischer Technologie, einem florierenden innovativen Ökosystem und der Stärke der amerikanischen Partnerschaften, die durch eine vorausschauende Politik, deren Umsetzung und Ressourcen ermöglicht werden, was zusammen einen strategischen und militärischen Vorteil in den kommenden Jahren bieten wird.
Dieser Vorteil ist jedoch im Weltraum nicht gesichert. China hat die Raumfahrt zu einer der wichtigsten Industrieprioritäten erklärt, und die amerikanischen CRS-Unternehmen verlieren gegenüber ausländischen Konkurrenten an Boden. Die Verbreitung von Raumfahrttechnologien und das Wachstum der globalen Raumfahrtindustrie - mit einem Wert von über 386 Milliarden Dollar - veranlassen zahlreiche Länder und Privatunternehmen dazu, ihre eigenen Raumfahrtprogramme zu starten, wodurch die Zahl der Akteure und damit der Wettbewerb auf der Weltbühne erheblich zunimmt. Die National Geospatial-Intelligence Agency (NGA) rechnet in den nächsten vier bis fünf Jahren mit dem Start von 500 Fernerkundungssatelliten pro Jahr. Die NGA geht jedoch auch davon aus, dass ausländische CRS-Konkurrenten den USA in bestimmten Bereichen wie dem Radar mit synthetischer Apertur und der multispektralen Bildgebung voraus sind. Ohne eine wirksame CRS-Politik und deren Umsetzung besteht die reale Gefahr, dass die amerikanischen Unternehmen weiter verdrängt werden.
Eine weitere deutliche Veränderung seit Beginn des Jahrtausends ist das private Kapital, das in die kommerzielle Raumfahrt fließt, um die Entwicklung, den Start und den Betrieb von Satelliten zu finanzieren. Allein im Jahr 2020 wurden 7,8 Milliarden Dollar in neu gegründete Raumfahrtunternehmen investiert. Diese Investitionen stehen in krassem Gegensatz zu 2003, als die US-Regierung als "Ankermieter" gebraucht wurde, um die kommerziellen Bildgebungsunternehmen zahlungsfähig zu halten. Die gleiche Abhängigkeit von der US-Regierung wird sich jedoch ohne eine modernisierte Exportpolitik wiederholen, die einen größeren internationalen Kauf von US-CRS-Daten und -Produkten ermöglicht.
Angesichts dieser Veränderungen in der Wettbewerbslandschaft ist die Nutzung kommerzieller Fähigkeiten für die Sicherheit der Vereinigten Staaten von entscheidender Bedeutung. Kommerzielle Satelliten-Fernerkundungsfähigkeiten und die daraus resultierenden Daten können zur Ergänzung bestehender Regierungssysteme genutzt werden, sie liefern nicht klassifizierte und gemeinsam nutzbare Erkenntnisse und verringern das von der US-Regierung übernommene Risiko, da umfangreiches Privatkapital in kommerzielle Unternehmen investiert wird.
Die Vorreiterrolle der US-Industrie ist ein echter Wettbewerbsvorteil, durch:
die Bereitstellung einer wertvollen Redundanz für die US-Fähigkeiten (nicht nur eine Ergänzung), die eine gerechtfertigte Abhängigkeit des Auslands von den kommerziellen US-Fähigkeiten schafft, nicht von denen unserer Gegner
die Auslösung von Kapitalflüssen, die hoch bezahlte und innovative Arbeitsplätze hier in den USA schaffen
die Stärkung der amerikanischen MINT-Talente und der Aufbau von Kapazitäten bei unseren Verbündeten und Partnern; und
die Entwicklung neuer Technologien und Fähigkeiten für die Umweltüberwachung und Wetterbeobachtung, um den Klimawandel zu verstehen und die Gesellschaft zu schützen.
Die nationale Politik hat zwar die zahlreichen Vorteile der kommerziellen Fernerkundung anerkannt und die US-Regierung ermutigt, diese Dienste so weit wie möglich zu nutzen, aber die Umsetzung ist oft unzureichend. Bei der Haushaltsplanung wird der Beschaffung kommerzieller Dienste keine Priorität eingeräumt, so dass sie durchweg unterfinanziert ist. Ohne ein effizienteres Überprüfungsverfahren werden US-Unternehmen weiterhin Aufträge an ausländische Wettbewerber verlieren.
Seit mehr als zwei Jahrzehnten veröffentlicht die Satellite Industry Association (SIA) ihren SIA State of the Satellite Industry Report. Der SIA-Branchenbericht, der von Bryce Space and Technology, LLC, erstellt wird, stützt sich auf eigene Umfragen bei Satellitenunternehmen, eingehende öffentliche Informationen und unabhängige Analysen, die zur Bewertung der Leistung der wichtigsten Sektoren der Satellitenindustrie, einschließlich Satellitendienste, Fertigung, Bodenausrüstung und Startdienste, kombiniert werden. Die folgende Grafik gibt einen Überblick zum Bericht vom Mai 2025.
Der SIA State of the Satellite Industry Report in graphischer Komprimierung Quelle: SIA
Raumfahrt und damit auch Fernerkundung besitzen vielfältige Verknüpfungen mit unterschiedlichsten Fachbereichen. Lehrstühle im In- und Ausland bieten auf ihren Webseiten profunde, frei zugängliche Tutorials an, nationale und internationale Raumfahrtagenturen haben für ihren Internetauftritt hervorragende Bildungsangebote entwickelt.
Ideen für einen Zugang zur Thematik bietet z.B. die ESA mit ihrer Mindmap zu den Verflechtungen von Technologien und Themen.
Syn. Raumfahrtorganisation, engl. space agency; üblicherweise eine unter staatlicher oder halbstaatlicher nationaler wie auch transnationaler Kontrolle stehende Organisation zur Förderung und Nutzung der bemannten und unbemannten Raumfahrt.
Übliche Ziele von Raumfahrtagenturen sind:
Entwicklung und Anwendung von den Weltraum betreffenden Erkenntnissen für die nationale Bevölkerung wie auch der Menschheit
Entwicklung von Raumfahrttechnologie
zivile und / oder militärische Forschung
Nachwuchsförderung
Koordination nationaler bzw. transnationaler Raumfahrtaktivitäten
Die Raumfahrtindustrie trägt zu den Zielen der Europa 2020-Strategie der EU für intelligentes, nachhaltiges und integratives Wachstum bei. Sie treibt den wissenschaftlichen Fortschritt voran und kurbelt Wachstum und Beschäftigung in anderen Bereichen wie Telekommunikation, Navigation und Erdbeobachtung an. Diese Systeme und Dienste gewährleisten die Unabhängigkeit und Sicherheit der EU und tragen gleichzeitig zur Bewältigung wichtiger gesellschaftlicher Herausforderungen wie Klimawandel, knappe Ressourcen, Gesundheitssektor und eine alternde Bevölkerung bei. Sie liefern uns auch strategisch wichtiges Wissen, das die Außenbeziehungen der EU in Bereichen wie Entwicklungshilfe und humanitäre Hilfe unterstützt.
Die Schlüsselprioritäten einer raumfahrtbezogenen Industriepolitik der EU, wie sie in einer Mitteilung der Kommission von 2013 definiert wurden, sind
die Schaffung eines kohärenten und stabilen Regulierungsrahmens zur Unterstützung von Raumfahrtaktivitäten;
die Weiterentwicklung einer wettbewerbsfähigen, soliden, effizienten und ausgewogenen industriellen Basis in Europa und die Unterstützung der Beteiligung von kleinen und mittleren Unternehmen (KMU) in diesem Sektor;
die Unterstützung der globalen Wettbewerbsfähigkeit der EU-Raumfahrtindustrie, indem der Sektor dazu ermutigt wird, kosteneffizienter zu werden;
Entwicklung von Märkten für Raumfahrtanwendungen und -dienste;
Gewährleistung der technologischen Unabhängigkeit und des unabhängigen Zugangs Europas zum Weltraum.
Gesetzgebung
Einer der Hauptpfeiler der raumfahrtbezogenen Industriepolitik der EU ist die Verpflichtung zur Schaffung eines Regulierungsrahmens für den Binnenmarkt für Raumfahrtprodukte, -anwendungen und -dienstleistungen.
Ziel des "Vorschlags für eine Richtlinie über die Verbreitung von Erdbeobachtungssatellitendaten zu kommerziellen Zwecken" ist es, einen besseren Zugang zu hochauflösenden Erdbeobachtungssatellitendaten (HRSD) zu gewährleisten. Zusammen mit HRSD-basierten Anwendungen ist dies ein wesentliches Instrument für die Umweltüberwachung, Stadtplanung, Landwirtschaft, Bewirtschaftung natürlicher Ressourcen, Katastrophen- und Notfallmanagement sowie Sicherheit und Verteidigung.
Gegenwärtig unterscheiden sich die Vorschriften für kommerzielle Aktivitäten unter Verwendung von HRSD zwischen den EU-Ländern. Diese Situation schafft Hindernisse für die Marktentwicklung, da sie den Zugang zu wichtigen Daten für Unternehmen erschwert.
Die vorgeschlagene Richtlinie wird die kommerzielle Erdbeobachtung und den Zugang zu Satellitendaten innerhalb der EU erleichtern und damit die Entwicklung des Sektors und die Schaffung neuer Produkte und Dienstleistungen beschleunigen. Erreicht wird dies durch die Einführung neuer Produkte und Dienstleistungen:
eine gemeinsame Definition von HRSD, die festlegt, welche Satellitendaten als hochauflösend und regulierungsbedürftig gelten und welche Daten bereits "geschäftsfähig" sind;
gemeinsame Standards für Transparenz, Vorhersehbarkeit, Rechtssicherheit und faire Behandlung;
gemeinsame Standards für Effizienz und unternehmensfreundliche Umsetzung, insbesondere hinsichtlich der Verfahren, die von den EU-Ländern zur Regulierung der Verbreitung von HRSD verwendet werden.
Normung
Die Normung ist der Schlüssel für eine möglichst effiziente Nutzung weltraumgestützter Systeme und die Erschließung neuer Märkte für weltraumgestützte Dienste. Klare Normen tragen dazu bei, die Gestalt künftiger Märkte zu definieren und bilden eine solide Grundlage für Investitionsentscheidungen. Öffentliche Einrichtungen sind oft Hauptnutzer von Weltraumsystemen und können die Entwicklung von Normen beschleunigen.
Europäische Normungsorganisationen (ESOs) wie das Europäische Komitee für Normung (CEN), das Europäische Komitee für elektrotechnische Normung (CENELEC) und das Europäische Institut für Telekommunikationsnormen (ETSI) haben von der Kommission den Auftrag, auf der Grundlage der bereits von der Europäischen Organisation für Zusammenarbeit bei der Normung im Weltraum geleisteten Arbeit Normen für die Raumfahrtproduktions- und -dienstleistungsindustrie zu entwickeln. Eine besonders dringende Notwendigkeit besteht darin, eine vollständige Interoperabilität zwischen nationalen und europäischen weltraum- und bodengestützten Systemen zu erreichen.
Wettbewerbsfähigkeit und KMU
Die Beteiligung von KMU ist für die Wettbewerbsfähigkeit der europäischen Raumfahrtindustrie von wesentlicher Bedeutung. KMU spielen auch eine Schlüsselrolle bei der Entwicklung vieler nachgelagerter Dienste und Anwendungen. Gegenwärtig besteht die europäische Industrie für Satellitennavigations- und Erdbeobachtungsdienste hauptsächlich aus KMU und neu gegründeten Unternehmen (Start-ups).
Engl. space mission; in der Raumfahrt der gesamte Ablauf von Planung, Bau, dem eigentlichen Flug und dessen Abwicklung eines Raumflugkörpers sowie die Auswertung der gewonnenen Daten.
Flüge von Objekten in die obere Atmosphäre, die als Experiment dienen, in Zusammenarbeit mit der Aeronomie diese untersuchen (etwa Höhenforschungsraketen) oder Grenzfälle zwischen Raum-, Luftfahrt und militärischer Raketentechnik werden nicht als Raumfahrtmissionen bezeichnet.
Raumfahrtmissionen werden nicht nur als nationale Projekte durchgeführt, sondern häufig durch multinationale Institutionen, wie die Europäische Weltraum-Agentur (ESA), oder vermehrt auch durch internationale Firmen realisiert.
Kooperationen zwischen Nationen sowie zwischen staatlichen und kommerziellen Einrichtungen gewinnen an Bedeutung. Solche öffentlich-industriellen Partnerschaften werden als Public Private Partnerships (PPP) bezeichnet. Ein Beispiel für ein PPP-Projekt ist die deutsche TerraSAR-X-Mission.
Ein übliches Raumfahrtsystem besteht aus drei, entsprechend dem Missionsziel aufeinander abgestimmten Systemsegmenten:
Das Transfersegment dient dem Transport des Satelliten mit dessen Nutzlast in den Weltraum durch einen Träger, typischerweise eine Rakete.
Das Bodensegment dient zur Steuerung und Überwachung des Satelliten und seiner Nutzlast sowie zur Verteilung und Verarbeitung der Nutzlastdaten.
Wie in der folgenden Abbildung ersichtlich können die drei Systemsegmente weiter in sogenannte Systemelemente untergliedert werden (weitere Erläuterungen s. Ley, Wilfried et al. S. 51 ff.).
Strukturierung eines Raumfahrtsystems in Systemelemente am Beispiel des deutschen Radarfernerkundungssystelliten TerraSAR-X
Legende: (SAR = Synthetic Aperture Radar, LCT = Laser Communication Terminal, GPS = Global Positioning System)
Quelle: HBN
Klassifizierung von Raumfahrtmissionen
Der ausschlaggebende Faktor für die Eigenschaften eines Raumfahrzeugs, des dazugehörigen Bodensegments und der Mission sind seine Anwendung und die sich daraus ergebenden Anforderungen. Neben Standardsystemen bei den Raumfahrzeugen, wie zum Beispiel einheitliche Plattformen mit unterschiedlichen Nutzlasten, sind auch für die Bodensegmente und bei den Trägern standardisierte Komponenten verfügbar. Im Folgenden sind die neun charakteristischen Anwendungsbereiche von Raumfahrtmissionen aufgelistet:
Die deutsche Bundesregierung hat im September 2023 eine neue Raumfahrtstrategie vorgestellt, die die Chancen und Ziele der Bundesregierung für die Raumfahrt bis 2030 aufzeigt.
Die neue Raumfahrtstrategie trägt der zunehmenden Bedeutung der Raumfahrt für unsere Gesellschaft Rechnung und konzentriert sich dabei auf aktuelle und zukünftige Herausforderungen. Im besonderen Fokus stehen das Voranbringen privatwirtschaftlicher Initiativen in der Raumfahrt, bekannt als New Space, der Einsatz von Raumfahrtanwendungen zur Bekämpfung des Klimawandels und ein verantwortungsvolles und nachhaltiges Handeln im Zusammenhang mit Raumfahrt.
Seit dem Erlass der letzten Weltraumstrategie im Jahr 2010 haben sich die diesbezüglichen wirtschaftlichen, geopolitischen und gesellschaftlichen Rahmenbedingungen fundamental verändert. Ebenso hat sich die Raumfahrtindustrie rasant weiterentwickelt. Der Gesamtumsatz der Raumfahrtindustrie ist von 2010 bis 2021 um 70 Prozent auf weltweit 469 Milliarden Dollar im Jahr 2021 gestiegen (Space Foundation, The Space Report, 2022). Die weltweiten staatlichen Budgets für die zivile Raumfahrt wuchsen von 36,8 Mrd. US-Dollar 2010 auf 55,3 Mrd. US-Dollar 2022 (+ 50 %).
Die Zahl der Satelliten in der Umlaufbahn stieg von 2010 (3.380) bis 2021 (10.100) sogar um fast 200 Prozent. Betrieben 2010 noch 50 Staaten überhaupt Raumfahrt, sind es heute 100 (+ 100%). Im Jahr 2010 starteten 70 Trägerraketen in den Weltraum, 2022 waren es bereits 179 (+ 155%). Die Zahl der von ihnen transportierten Satelliten stieg von 124 (2010) auf 2.500 (2022) (+ 2.016%).
Der Erlass einer neuen Raumfahrtstrategie war lange überfällig. Die Raumfahrtindustrie hat durch die veränderten geopolitischen Anforderungen und dem mit der Kommerzialisierung verbundenen beschleunigten Innovationsfortschritt erheblich an Bedeutung gewonnen.
Die Strategie identifiziert neun Handlungsfelder für die Bundesregierung:
Europäische und internationale Zusammenarbeit
Raumfahrt als Wachstumsmarkt - Hightech und New Space
Klimawandel, Ressourcen und Umweltschutz
Digitalisierung, Daten und Downstream
Sicherheit, strategische Handlungsfähigkeit und globale Stabilität
Nachhaltige Nutzung des Weltraums
Weltraumforschung
Internationale Weltraumexploration
Raumfahrt im Dialog und Gewinnung von Talenten
Die neue Raumfahrtstrategie ist in einem umfangreichen Beteiligungsprozess entstanden. Um die Interessen der gesamten Raumfahrt-Community zu erfassen, wurden neben den Ressorts auch Expertinnen und Experten aus, Forschung, Industrie und Zivilgesellschaft zielgerichtet eingebunden.
Die europäische und die internationale Zusammenarbeit, insbesondere die Kooperationen in ESA, EUMETSAT und EU, sind neben den nationalen Programmen und Aktivitäten Grundpfeiler für eine erfolgreiche Umsetzung der deutschen Raumfahrtpolitik.
Engl. spacecraft; alle Fahrzeuge, die zur Fortbewegung im Weltraum geschaffen wurden. Der Hauptantrieb im luftleeren Raum erfolgt heute noch meistens durch konventionelle Raketentriebwerke.
Als Systemelement einer Raumfahrtmission können bei einem Raumfahrzeug folgende Subsysteme unterschieden werden:
Ein Raumfahrzeug ist bemannt oder unbemannt. Das Ziel kann die Umlaufbahn eines Himmelskörpers sein, ein Trabant, Planet oder Komet, der durch einen Astronauten respektive Kosmonauten oder Roboter (etwa einen Rover) erkundet, oder eine Gegend, die fotografiert und analysiert wird. Nicht nur Menschen, auch Tiere wurden wiederholt ins All geschossen, Fliegen, Affen und Hunde. Raumsonden dringen immer weiter ins Universum vor und hinterlassen immer mehr Spuren.
Raumflugkörper und ihre Nutzung Quelle: Klaus Brieß, TU Berlin
Syn. geometrische A., Bildauflösung; engl. spatial resolution, geometric r., image r., franz. résolution spatiale; Maß der kleinsten identifizierbaren Fläche auf einem Bild als diskrete unabhängige Einheit.
Nach DIN 18716 gilt als räumliche Auflösung die "Fähigkeit eines Sensorsystems, Signale von benachbarten Objektstrukturen getrennt zu erfassen". Der Definition sind folgende zwei Anmerkungen beigefügt:
"Die räumliche Auflösung kann entweder auf die Bildgröße (in µm) oder auf die Objektgröße (in m) bezogen werden."
"Die geometrische Auflösung wird durch die Bodenauflösung und die Modulationsübertragungsfunktion (MTF) bestimmt."
Bei Rasterdaten wird die räumliche Auflösung oft ausgedrückt als die Größe der Rasterzelle. Die Bodenauflösung in Zentimetern oder Metern gibt dann an, welche Strecke auf der Erdoberfläche ein Bildpunkt (Pixel) eines Orthophotos abbildet. Diese Aussage wird häufig so interpretiert, dass Objekte ab dieser Länge auf dem Bild sichtbar werden (bei einer Auflösung von 50 cm wären dann Objekte mit einer Länge von mindestens 50 cm sichtbar). Tatsächlich jedoch hängt die Sichtbarkeit von mehreren Faktoren ab, bspw. dem Kontrast des Objektes und seiner Umgebung. Daher sind oft auch Objekte mit einer Länge < Auflösung zu sehen.
In der Fernerkundung ist die räumliche Auflösung definiert bezüglich des Durchmessers der Grundfläche, die erkannt/unterschieden werden kann und ist häufig vergleichbar mit der Größe der Erdoberfläche, die von einem einzigen Pixel bedeckt wird. Damit hängt die Erkennbarkeit von Details in FE-Aufnahmen direkt von der räumlichen Auflösung ab. Häufig wird der Begriff auch synonym gebraucht mit Instantaneous Field of View (IFOV).
Die Wahl des räumlichen Auflösungsvermögens hängt hauptsächlich von der geplanten Anwendung des Fernerkundungsprodukts ab. Die grob auflösenden, aber global aufgezeichneten Daten werden vorwiegend für klimarelevante Untersuchungen verwendet (Strahlungshaushalt der Erde, Wetterbeobachtung, Meereisbedeckung, Oberflächentemperatur), die hochauflösenden Daten hingegen zur topographischen und thematischen Kartierung (Bildkarten, Landnutzung, Ernteprognosen, Präzisionslandwirtschaft, Vegetation, Waldschäden, mineralogische Prospektion) sowie als Planungsgrundlage.
Ein weiterer Faktor, der diese Wahl beeinflusst, ist die Größe der zu beobachtenden Szene. Hochauflösendes Bildmaterial ist teurer und erzeugt Dateien von großer Größe. Hochauflösende Bilder werden im Allgemeinen für Zielgebiete verwendet, die kleiner als 100 Quadratkilometer sind.
Die Fernerkundungssysteme an Bord der METEOSAT-Satellitenserie haben eine räumliche Auflösung von ungefähr 900 m, während die auf der SPOT-Serie bis hinunter auf 2,5 m, jene auf Ikonos II bis 1 m, die auf QuickBird II bis 61 cm und die auf WorldView-3 bis 30 cm (jeweils panchromatisch) auflösen kann. Es wird vermutet, dass die Auflösung militärischer Aufklärungssatelliten 10 cm und weniger erreichen können.
Noch vor 20 Jahren war es unvorstellbar, dass so hoch aufgelöste Satellitenbilder frei verkauft werden. Zu groß war die Angst etwa der US-Geheimdienste und -Militärs, dass die Informationen in falsche Hände geraten könnten. Doch mittlerweile dürfen private Satellitenbetreiber mit ultrascharfen Fotos Geschäfte machen, solange sie sich an bestimmte Spielregeln halten. So hat DigitalGlobe erklärt, dass Aufnahmen tabu seien, die die nationale Sicherheit der USA berühren könnten.
Interessant ist dabei, dass sich derzeit das Machtverhältnis zwischen kommerziellen und staatlichen Betreibern verschiebt. War es lange so, dass vornehmlich von Militärs genutzte Satelliten die bessere Technologie hatten, ist die Weiterentwicklung bei kommerziellen Anbietern derzeit rasant.
Weiterhin versucht etwa die US-Regierung über Auflösungsbeschränkungen dem Einhalt zu gebieten. Seit dem Jahr 2014 gilt eine maximale Auflösung von 25 Zentimeter, bei der dann grob gesprochen ein Schuh die Größe eines einzelnen Bildpunkts hat. Das ist genug, um größere Objekt wie Autos zu erkennen, aber nicht ausreichend, um das betreffende Kennzeichen lesen oder gar Personen identifizieren zu können. Aus einer Privatsphärenperspektive gilt dies ein ganz guter Kompromiss, doch es zeichnet sich ab, dass diese Beschränkung nicht auf Dauer aufrechterhalten werden kann, insbesondere angesichts der wachsenden Konkurrenz aus China.
Gleichzeitig ist die Frequenz der Aufnahmen in den vergangenen Jahren massiv gewachsen: So behauptet etwa die Firma Planet, dass man mit den eigenen Satelliten den gesamten Planeten einmal täglich erfassen kann. Konkurrent Black Sky gibt an, jede große Stadt 70-mal am Tag zu fotografieren. All das reicht zwar noch nicht aus, um die Bewegungen einzelner Personen in Echtzeit verfolgen zu können, Muster lassen sich damit aber sehr wohl identifizieren. Also etwa, wohin sich ein Auto bewegt, wo die Kinder zur Schule gehen, welche Geschäfte besucht werden. Durch die neuen Möglichkeiten von Maschinenlernen kann das auch massenhaft automatisiert erfolgen.
Räumliche Auflösung
Links: Bilder von Harbour Town in Hilton Head, SC, mit verschiedenen nominellen räumlichen Auflösungen
Rechts: Bilder des gleichen Ausschnittes eines Wohngebietes in Mechanicsville, New York. Die Bilder wurden am 1. Juni 1998 aufgenommen mit einer nominellen räumlichen Auflösung von 0,3 x 0,3 m. Zum Einsatz kam eine Digitalkamera. Die dargestellten räumlichen Auflösungen sind simuliert und dazu durch Resampling der Originaldaten aus diesen abgeleitet.
Quelle: Jensen 2009 (l) und 2007 (r)
Moderne Systeme erlauben die gleichzeitige Aufnahme von panchromatischen und multispektralen Daten. Durch Datenfusion ist es dann mit Einschränkungen möglich, multispektrale Bilder mit einer Auflösung zu generieren, die an jene der panchromatischen Aufnahme heranreicht.
Die hohe Auflösung wird durch eine verringerte Aufnahmebreite erkauft. Während die indischen Satelliten IRS-1C und IRS-1D mit einer Bodenauflösung von 5 Metern mit einem Überflug noch einen Streifen von 70 km abdecken, reduziert sich die Streifenbreite bei den 1m-Satelliten auf 4-20 km. Diese technisch bedingte Limitierung zieht eine herabgesetzte Überflugwiederholrate nach sich. Diese Einschränkung wird aufgehoben, indem die Sensoren verschwenkbar sind und zwei oder mehrere Satelliten der selben Serien in Umlauf gebracht werden sollen. Dadurch wird es möglich, idente Gebiete auch innerhalb kurzer Zeit wiederholt abzudecken, eine Tatsache, die für ein zuverlässiges Monitoring von Bedeutung ist.
Die eigentlich wünschenswerte hohe räumliche Auflösung bei möglichst vielen Systemen findet ihre Grenzen in den Datenmengen, die zu den Empfangsstationen am Boden übertragen werden müssen. Diese werden durch die Übertragungsfrequenz (X-Band) beschränkt, da an Bord keine oder nur minimale Speichermöglichkeiten gegeben sind. Eine Verbesserung der Pixelgröße um den Faktor 2 bedeutet eine 4-fache Datenmenge pro aufgezeichnetem Spektralkanal. Bei Landsat TM würde der Schritt von 30m-Pixeln zu 15m-Pixeln bei 7 Kanälen die 28-fache Datenmenge ergeben, d.h ein Bild würde anstatt 250 Byte dann 7 GByte groß werden. Aus diesem Grund bedingen sich Streifenbreite und Pixelgröße wechselseitig.
Räumliche und temporale Auflösung bei verschiedenen Anwendungen
Bei bestimmten Fernerkundungsanwendungen müssen Überlegungen zur räumlichen und zeitlichen Auflösung getroffen werden müssen. Mit dem Anstieg der Anforderungen an die zeitliche Auflösung ist es in der Regel nötig, die räumliche Auflösung zu reduzieren, damit die Menge an Sensordaten noch handhabbar bleibt.
Normalerweise sind für viele Anwendungen, die sehr detaillierte räumliche Informationen erfordern, z.B. Landnutzungskartierungen, zum Glück keine hohen temporalen Auflösungen vonnöten. Hierbei genügen gewöhnlich Datensätze, die alle 5 bis 10 Jahre erhoben werden.
Ausnahmen gelten z.B. für die Bereiche Precision Farming, Ernteertragsuntersuchungen, Verkehrsstudien oder Notfall-Management, für die beide Auflösungsarten sehr gute Qualitäten liefern müssen und mit ihrer Datenfülle entsprechend schwierig zu verarbeiten sind. Es kann auch zu weiteren Abwägungsnotwendigkeiten bezüglich anderer Auflösungsarten kommen.
Räumliche und temporale Auflösung bei verschiedenen Anwendungen Quelle: Jensen 2007
In der Fernerkundung beschreibt die räumliche Textur (engl. spatial texture) die Anordnung, Variabilität und Häufigkeit von Grauwerten oder Farben innerhalb eines Bildbereiches. Diese Textur entsteht durch typische Muster, die charakteristisch für bestimmte Objektklassen oder Landbedeckungen sind, wie zum Beispiel Wälder, Felder oder Siedlungen.
Während die reine spektrale Signatur (Farbe) eines Pixels verrät, was sich dort befindet (z. B. Vegetation), gibt die Textur Aufschluss über die Struktur und Beschaffenheit der Oberfläche (z. B. glatter Rasen vs. raue Baumkronen eines Waldes).
Engl. space segment; im engeren Sinne eine Sammelbezeichnung für Satelliten, Raumkapseln, Raumstationen oder ähnliches mit ihrer Nutzlast in einer Erdumlaufbahn als Teilsegment einer Raumfahrtmission. Genaugenommen fallen aber auch Raumsonden auf interplanetaren Bahnen oder auf Umlaufbahnen um andere Himmelskörper unter den Überbegriff Raumsegment. Ein sogenanntes "end-to-end Satellitensystem" besteht aus Transfersegment, Raum- und Bodensegment.
Engl. probe, unbemanntes Raumfahrzeug, das zu Erkundungszwecken ins Weltall geschickt wird. Im Gegensatz zu einem (Erd)Satelliten verlässt eine Raumsonde die Umlaufbahn der Erde und fliegt ein entferntes Ziel im Weltraum an, um dieses zu untersuchen (z. B. Mars, Asteoriden, Kometen, Jupitermonde). Wenige erforschen den interplanetaren Raum, was geringere Anforderungen an die Bahnberechnung stellt. Um der Erdanziehung zu entkommen muss die Geschwindigkeit der Sonde 11 km/s und mehr betragen. Manchmal wird eine Raumsonde später zu einem Satelliten eines anderen Himmelskörpers. Daneben werden auch Raumfahrzeuge - ohne Rücksicht auf die Missionsspezifikationen - in einem Halo-Orbit um einen der Lagrange-Punkte (auch: Librationspunkte) L 1 und L 2 zu den Raumsonden gezählt, da diese Fahrzeuge sich nicht mehr in einer Umlaufbahn um die Erde befinden.
Wegen der oft jahrelangen Dauer von Raumsondenmissionen werden an die technischen Einrichtungen von Raumsonden höchste Anforderungen gestellt. Ein großes Problem bei Raumsonden gegenüber erdumkreisenden Satelliten ist der große Erdabstand, der lange Laufzeiten der von der Bodenstation ausgesandten Steuerbefehle bewirkt. Aus diesem Grund müssen Raumsonden über Systeme verfügen, die sie in gewissem Umfang von Bodenstationen unabhängig machen.
Für Raumsondenmissionen muss der Einschusswinkel mit einer Genauigkeit von unter einer Bogensekunde festgelegt werden. Die Navigation von Raumsonden muss mit höchster Genauigkeit erfolgen. Sie erfolgt mit Hilfe des Dopplereffekts und der Signallaufzeiten. Auf diese Weise wird ihre Position mit einer Genauigkeit von unter einem Meter – unabhängig von ihrer Entfernung zur Erde – ermittelt.
Orbiter – Sonden, die eine Umlaufbahn um einen Himmelskörper einschlagen.
Lander – Sonden, die auf einem Himmelskörper landen. Hier ist eine weitere Unterteilung sinnvoll:
Hydrobot – eine Sonde, die selbständig die Tiefen unbekannter Gewässer erkunden kann.
Kryobot – eine Sonde, die sich durch Eis hindurch schmilzt, um dieses und darunterliegende Medien zu erkunden.
Penetrator – eine Raumsonde, die sich bei einer ungebremsten Landung bis zu einigen Metern in den zu untersuchenden Himmelskörper bohrt.
Rover – ein mobiles Landegerät, mit dem größere Regionen erkundet werden können.
Probenrückführung (sample return) – Sonden, die Proben eines Himmelskörpers oder im Weltraum eingesammelte Partikel zur Erde zurückführen. Zuvor könnte ggf. eine Landung auf dem Himmelskörper nötig sein.
Engl. noise, franz. bruit d'image; unerwünschte, zufällige oder periodische Schwankungen eines Sensorsignals, die die Grundform des Signals unklar lassen und damit die Analyse und Interpretation erschweren können. Diese Überlagerungen sind wellenlängenspezifisch. Zufällige Schwankungen können auf die Leistung des Fernerkundungssystems während Aufnahme, Speicherung, Übertragung und besonders Empfang der Daten zurückgeführt werden.
Dagegen wird periodisches Rauschen durch Interferenzen bzw. verschiedene Bestandteile des Systems der Fernerkundung hervorgerufen. Das Rauschen spielt bei Fernerkundungsanwendungen eine große Rolle, wenn es eine Überdeckung geringer Reflexionsdifferenzen, die jedoch objekttypisch sind, bewirkt. Eine Verringerung bzw. sogar Unterdrückung dieser Störungen kann im Rahmen der digitalen Bildverarbeitung mit Hilfe digitaler Filter erfolgen. Im eigentlichen Sinne ist Rauschen lediglich ein Maß für die Qualität eines Signals. Es wird dargestellt in Form des Signal-Rausch-Verhältnisses, das durch den Vergleich mit dem korrespondierenden Sensorsignal zu gewinnen ist.
Engl. Rayleigh scattering franz. diffusion (de) Rayleigh; nach Lord Rayleigh (1842-1919) benannte Streuung von elektromagnetischer Strahlung an kugelförmigen Teilchen, deren Radius sehr klein ist gegenüber der Wellenlänge der gestreuten Strahlen.
In der Atmosphäre bedeutet dies in erster Linie die Streuung von Lichtstrahlen an den Luftmolekülen, deren Abmessungen (10-10 m) deutlich kleiner als die Lichtwellenlänge sind. Beispiele für solche Teilchen sind winzige Staubkörnchen sowie Stickstoff- (NO2) und Sauerstoffmoleküle (O2). Die Rayleigh-Streuung tritt vor allem in oberen Schichten der Atmosphäre auf. Ohne Schwebeteilchen und Streuung würde der Himmel schwarz erscheinen.
Rayleigh-Streuung
Die Art der Streuung wird durch die Größe der Partikel im Verhältnis zur Wellenlänge der EM-Wellen bestimmt. Es gibt zwei Arten von Streuung: molekulare Streuung (auch Rayleigh-S. genannt) und Aerosolstreuung.
Molekulare Streuung tritt auf, wenn die Teilchen viel kleiner als die Wellenlänge der einfallenden Strahlung sind. Diese Streuung wird vernachlässigbar im Vergleich zur Aerosolstreuung bei Wellenlängen von mehr als einem Mikrometer. Für unsere Zwecke betrifft sie das sichtbare Licht, nicht die IR-Strahlung. Das Licht wird in alle Richtungen gleichmäßig gestreut, aber kürzere Wellenlängen (Blau) werden stärker gestreut als längere Wellenlängen (Rot). Der Himmel erscheint blau, weil blaue Photonen, die von der Sonne kommen, viel stärker gestreut werden als rote Photonen.
Im Gegensatz zur Mie-Streuung ist die Rayleigh-Streuung stark wellenlängenabhängig. Die Rayleigh-Streuung ist umgekehrt proportional zur 4. Potenz der Wellenlänge (λ-4), das heißt, kürzere Wellenlängen werden stärker gestreut als große Wellenlängen. Die kurzwelligen violetten und blauen Anteile des Sonnenlichts (Wellenlängen L= 0,38 bis 0,45 µm) werden stärker gestreut als das langwellige Licht (Orange und Rot, L=0,65 bis 0,75 µm). Bei hohem Sonnenstand ist die Strecke, die das Licht durch die Atmosphäre zurücklegen muss zu kurz, um nennenswerte Lichtanteile im langwelligen Spektralbereich zu streuen, während im kurzwelligen Bereich eine wesentliche Streuung stattfindet. Daher erscheint das Streulicht (und damit der Himmel) blau.
Bei niedrigem Sonnenstand ist die Strecke des Sonnenlichts durch die Erdatmosphäre groß genug, um auch nennenswerte Anteile des roten Lichts zu streuen. Während die blaue Intensität durch die stärkere Streuung über den gesamten Himmel verteilt wird, überwiegt der Rotanteil in der „Umgebung” um die Sonne. Die gestreute Strahlung erreicht die Erdoberfläche aus allen Himmelsrichtungen.
Rayleigh-Streuung bei Tag und bei Sonnenuntergang
Die folgende Grafik veranschaulicht die Wirkung der Rayleigh-Streuung zu unterschiedlichen Tageszeiten. Tagsüber legt die Sonnenenergie den kürzesten Weg durch die Atmosphäre zurück. Die Rayleigh-Streuung bewirkt, dass ein klarer Himmel als blau wahrgenommen wird.
Bei Sonnenaufgang und Sonnenuntergang legt das Sonnenlicht einen längeren Weg durch die Atmosphäre zurück, bevor es uns erreicht. Die gesamte Strahlung kürzerer Wellenlängen wird nach einer gewissen Strecke gestreut, und nur die längeren Wellenlängen erreichen die Erdoberfläche. Infolgedessen sehen wir keinen blauen, sondern einen orangefarbenen oder roten Himmel.
Die Rayleigh-Streuung stört die Fernerkundung im sichtbaren Spektralbereich aus großen Höhen. Sie führt zu einer Verzerrung der spektralen Eigenschaften des reflektierten Lichts im Vergleich zu Messungen am Boden: Aufgrund der Rayleigh-Streuung werden die kürzeren Wellenlängen überschätzt. Bei Farbfotos, die aus großer Höhe aufgenommen wurden, ist sie für den Blaustich der Bilder verantwortlich. Im Allgemeinen vermindert die Rayleigh-Streuung die "Schärfe" von Fotos und damit ihre Interpretierbarkeit. In ähnlicher Weise wirkt sich die Rayleigh-Streuung negativ auf die digitale Klassifizierung von Daten aus multispektralen Sensoren aus.
Daten, die erhoben und unmittelbar an die Bodenstation übermittelt werden, im Unterschied zu gespeicherten oder playback-Daten. Ein Verzögerungseffekt ist auf die Dauer der Übermittlung beschränkt.
Die Reaper (dt. "Sensenmann") ist eine Aufklärungs- und Kampfdrohne des US-Herstellers General Atomics und eine Weiterentwicklung der MQ-1 Predator des gleichen Herstellers. Allerdings ist die Reaper deutlich größer als ihr Vorgänger. Die Drohne hat eine Spannweite von 20,12 Metern, ist 3,80 Meter hoch, knapp elf Meter lang hat ein maximales Abfluggewicht von 5,3 Tonnen. Zum Vergleich: Die 1995 eingeführte Predator wog startbereit nicht einmal ein Fünftel ihrer Nachfolgerin. Die Predator wurde 2018 ausgemustert, und die Reaper wurde zum wichtigsten unbemannten Flugzeug der US-Luftwaffe.
Für Aufklärungszwecke und Zielerfassung stehen Sensoren im optischen und Infrarotbereich sowie Radar zur Verfügung.
Gesteuert wird die Drohne von zwei Piloten in den USA: Ein Pilot befehligt die Mission und fliegt die Drohne, ein zweiter bedient die zahlreichen Sensoren, Kameras und Waffen. Die US-Armee arbeitet mittlerweile auch an KI-gesteuerten Drohnen, die ab 2031 dann selbst fliegen sollen. Neben den USA verfügen auch Frankreich, Italien, die Niederlande, Spanien und das Vereinigte Königreich über die Reaper-Drohnen.
Am 20. März 2020 hatte die Weiterentwicklung MQ-9B ihren Erstflug. Sie soll in den Versionen „SkyGuardian“ und „SeaGuardian“ gebaut werden. Die B-Version stellt gegenüber der ursprünglichen Reaper eine komplette Neuentwicklung dar, um eine Zulassung für den internationalen Luftraum zu erlangen.
Willkürliche Bezugsoberfläche, die eine grobe Annäherung an die Gestalt der Erde darstellt und die als Bezugsfläche für eine Landesvermessung dient. Den klassischen Landesvermessungen liegt zumeist ein konventionelles Ellipsoid oder ein lokal bestanschließendes Ellipsoid zugrunde. Für globale Aufgaben ist ein mittleres Erdellipsoid bzw. ein Niveauellipsoid vorzuziehen.
Vereinfacht ist die Erde eine an den Polen abgeplattete Kugel. Die Länge einer der Achsen am Äquator wird so gewählt, dass das Ellipsoid auf dieser Breite mit dem mittleren Meeresspiegel zusammenfällt. Beispielsweise hat das für die TOPEX/POSEIDON-Mission gewählte Ellipsoid einen Radius von 6378,1363 km und eine Abplattung von 1/298,257.
Auch Reflexionsgrad,Reflexionsvermögen, Reflektivität; Verhältnis zwischen der von einem beleuchteten Körper zurückgestrahlten Lichtmenge und der Intensität der Quelle. Reflektanz besitzt die Bezeichnung R und ist ohne eigene Einheit, d.h. sie wird auf einer Skala von 0 und 1 angegeben oder in Prozent zwischen 0 und 100.
Spektrale Reflektanzwerte verschiedener Arten von Landbedeckung im sichtbaren Spektralbereich
Jedes Pixel enthält Reflektanz-Informationen über die Charakteristik der dargestellten Objekte. Reflektanz erlaubt es uns, die verschiedenen Eigenschaften in einem Bild zu unterscheiden. Reflektanz ist ein Maß für die Menge und die Art von Energie, die von einem Objekt reflektiert wird.
Engl. reflection, franz. réflexion; die Rückkehr von Licht- oder Schallwellen von einer Oberfläche ohne Änderung der Frequenz innerhalb der monochromatischen Strahlungsanteile. DIN 18716 formuliert als Definition: "[Das] Zurückwerfen von Strahlung von einer Oberfläche oder einem Medium ohne Änderung der Frequenz seiner monochromatischen Komponenten".
Nach der Richtung der reflektierten Strahlung unterscheidet man gerichtete (spiegelnde) und/oder diffuse Reflexion. Reflexion an glatten Flächen ist gerichtete Reflexion, der Ausfallswinkel ist dabei gleich dem Einfallswinkel. Reflexion an rauhen Oberflächen ist diffus, je rauher eine Oberfläche, desto größer ist der Anteil diffuser Reflexion. Eine Lambertsche Fläche reflektiert alle auf sie fallende Strahlung vollkommen zerstreut und erscheint deshalb aus allen Richtungen gleich hell. Die meisten Materialien zeigen gemischte Reflexionscharakteristik. Das Reflexionsvermögen (Reflexionsgrad) entspricht dem Verhältnis des reflektierten zum auftreffenden elektromagnetischenStrahlungsfluss. Reflexion ist von der Wellenlänge der betrachteten Strahlungsanteile abhängig, die von der Oberfläche von Körpern auf der Erde ausgehen und somit entscheidend für die Identifizierung dieser Objekte.
Wasserflächen, Sandflächen oder Schotterflächen, die im Mikrowellenspektrum glatt erscheinen, reflektieren im Bereich des sichtbaren Lichtes diffus. Intensität und spektrale Verteilung diffuser Reflexion beruhen auf Materialeigenschaften sowie der äußeren und inneren Struktur der reflektierenden Oberflächen (z.B. Blattwerk). Weiter besteht eine gewisse Richtungsabhängigkeit sowohl in Bezug auf die einfallende als auch die reflektierte Strahlung.
Die Aufzeichnung objektrelevanter Reflexionswerte durch photographische oder digitale Sensorsysteme ist wichtigste Grundlage der Informationsgewinnung, der visuellen Bildinterpretation und der digitalen Bildklassifikation in der Fernerkundung (Ausnahme: Systeme, die die Thermalstrahlung erfassen). Von Sensoren gemessene Strahlungsintensitäten sind somit von Wellenlänge und Richtung (Sonnenstand und Beobachtungsrichtung, spektrale und angulare Signatur), von der Lage des Objektes (räumliche Signatur), vom Zeitpunkt der Beobachtung (zeitliche Signatur) und - im Mikrowellenbereich - vom Polarisationsgrad (Polarisationssignatur) abhängig.
Reflexionskurven für Schnee, Vegetation, Wasser und Fels
Die optischen Eigenschaften eines Materials haben Einfluss darauf, wie optische Strahlung beim Auftreffen auf die Materialoberfläche reagiert. Jedes Material hat eine eigene spektrale Signatur, die durch sein Vermögen zur Reflexion, Absorption und Transmission der eintreffenden Strahlung bei unterschiedlichen Wellenlängen bedingt ist.
Das Reflexionsverhalten wird in Reflexionskurven (syn. Signaturkurven) dargestellt, sie besitzen die Bedeutung von "spektralen Fingerabdrücken". Die Abbildung oben zeigt ausgewählte Reflexionskurven, an denen sich einige Reflexionsunterschiede verdeutlichen lassen.
Die Gegenüberstellung von spektralen Reflexionsgraden unterschiedlicher Wellenlängenbereiche ermöglicht weitreichende Charakterisierung von Boden- und Vegetationsarten der Erdoberfläche (Vegetationsindex). Im Spektralbereich des sichtbaren Lichtes und des nahen Infrarots werden die spektralen Signaturen unterschiedlicher Gesteinsarten durch charakteristische Absorptionsbanden geprägt, die in Zusammenhang mit der Energie der Elektronen spezifischer Atome (Ionen von Metallen wie Fe, Ni, Cr, Co) und der Vibrationsenergie der Atome spezifischer Moleküle (Wassermolekül, Hydroxyl-Gruppe) stehen. Geeignete spektrale Ratios gestatten die teilweise Extraktion dieser Informationen. Schmale Absorptionsbanden in den spektralen Reflexionssignaturen können durch Nutzung von hyperspektralen Sensoren (hyperspektraler Scanner) exakter erkannt und analysiert werden.
Besonders wichtig ist der charakteristische Unterschied zwischen dem sichtbaren und dem infraroten Spektralbereich. Die Spektralsignaturen gesunder grüner Vegetation weisen neben dem Chlorophyll-Reflexionsmaximum im grünen Spektralbereich einen besonders erwähnenswerten steilen Anstieg der Reflexion im nahen Infrarot auf. Dieser rote Kante ('red edge') genannte Gradient besitzt große Bedeutung bei der Auswertung von Bilddaten für eine Vegetationsanalyse. Er kommt u.a. bei der Entwicklung von Vegetationsindizes zum Tragen, die z.B. zur Identifizierung des Vitalitätsgrades von Pflanzen ausgenutzt werden. Dieser steile Anstieg bei 0,7 µm rührt von derden spezifischen Reflexionverhältnissen in den Blättern grüner Pflanzen her. Sie hängt eng mit der Wasserversorgung der Pflanze und anderen Vitalitätsfaktoren zusammen.
Die folgende Grafik zeigt schematisch, wie von den Chloroplasten blaues und rotes Licht weitgehend absorbiert, grünes Licht jedoch reflektiert wird, so dass die Blätter grün erscheinen. Dagegen wird der überwiegende Teil der infraroten Strahlung an den Grenzflächen (Zellwände, luftgefüllte Hohleräume) mehrfach gespiegelt und dadurch zu einem hohen Anteil reflektiert.
Absorption und Reflexion an grünen Blättern Quelle: Albertz 2007 nach Colwell et al. 1963
Der Anwendung von Reflexionskurven sind aber Grenzen gesetzt. So gibt es für eine jeweilige Oberflächenart keine allgemeingültigen Reflexionskurven. Die Signaturkurven von Objekten an der Erdoberfläche variieren vielmehr u.a. nach Beleuchtung, Jahreszeit, Beschaffenheit der Atmosphäre, Zustand des Oberflächenobjektes (z.B. Gesundheitszustand, Aggregatzustand, Feuchtegehalt) und Konfiguration des Aufnahmeinstrumentes. Beispielsweise verändert sich die Reflexion von Wasser u.a. mit dem Trübstoffanteil. Daher sind in den jeweiligen Untersuchungsgebieten sog. Trainingsgebiete notwendig, die eine aktuelle homogene Oberfläche aufweisen und eine Ableitung bzw. Kalibrierung von Signaturkurven erlauben.
Ein weiteres Problem stellen Mischformen dar. So lassen sich insbesondere Ausschnitte einer Kulturlandschaft (u.a. Bebauung mit Straßen, Industrieanlagen, Einzelhäuser in Gartenanlagen) nicht eindeutig aufgrund einer einzelnen Signaturkurve erfassen. Die Identifizierung ist vor allem von der geometrischen und spektralen Auflösung des Aufnahmesystems abhängig.
Beispiele von Signaturkurven finden sich vor allem in den Spektralbibliotheken des United States Geological Survey. Die ECOSTRESS Spectral Library (ehemals ASTER-Spektralbibliothek) des Jet Propulsion Laboratory enthält u.a. eine Suche nach Spektralsignaturen von über 3.400 Oberflächenmaterialien.
Reflexion bei drei Hauptkategorien von Oberflächen:
Bodenmaterialien - Die Reflexionscharakteristika von Böden und ähnlichen Materialien zeigen im sichtbaren Bereich und im nahen Infrarot ziemlich stabile Reflexion mit leicht positivem Zusammenhang zwischen Reflexion und Wellenlänge. Die größten Einflüsse haben Wassergehalt, Oberflächenrauigkeit, organische Bestandteile sowie der Anteil von Eisenoxid.
Vegetation - Die spektrale Reflexion von Vegetation hängt vornehmlich von Blattpigmenten, Zellstruktur und Wasserabsorption ab. Im sichtbaren Bereich wird die spektrale Reflexion durch Blattpigmente dominiert, vor allem Chlorophyll absorbiert blau und rot, so dass Blätter dem Auge grün erscheinen. Im nahen Infrarot zwischen ca. 0,7 und ca. 1,3 µm ist die Zellstruktur der Blätter ausschlaggebend. Nahe Infrarotstrahlung wird an den Zellwänden stark reflektiert. Dieser Effekt ist stark artenabhängig und auch von der Vitalität der Blätter. Gesunde Blätter zeigen starke Reflexion, für Blätter unter Stress nimmt die Reflexion immer mehr ab. Besonders wichtig ist der starke Anstieg der Reflexion beim Übergang vom Sichtbaren Licht zum Nahen Infrarot (ca. 700 nm).
Im mittleren Infrarot (jenseits ca. 1,3 µm) wird die spektrale Reflexion grüner Vegetation durch die Wasserabsorptions-Bänder bei 1,4 und 1,9 µm dominiert. Daten, die über Vegetationsgebieten aufgenommen werden, sind markant durch die Raumstruktur der Pflanzendecke beeinflusst. Sonnige und schattige Anteile sind in sehr komplexer Weise vermischt. Bei hohem Sonnenstand kann in Luftbildern ein schattenloser Fleck auftreten.
Wasserkörper - Auf die Reflexion von Wasserkörpern haben viele Faktoren Einfluss. Bedeutsam sind Wassertiefe, Schwebstoffe und Oberflächenrauigkeit. Daneben wird das erfasste Signal von den Raumwinkeln der Beleuchtung und der Beobachtung bestimmt.
Engl. degree of reflection, reflectance, franz. degré de réflexion; Maß Ρ (auch R), welches aussagt, zu welchem Anteil einfallende elektromagnetische Strahlung an einer Oberfläche reflektiert wird. Nach DIN 18716 ist der Reflexionsgrad das "Verhältnis der reflektierten Strahlung zu der einfallenden Strahlung".
Reflexionskurven veranschaulichen den Verlauf der Reflexion über einen sensorisch relevanten Spektralbereich und sind wichtige Interpretationshilfen in der Fernerkundung. Solche Reflexionskurven werden aus Labor- und Geländemessungen für eine Vielzahl von Materialien, z. B. von Mineralen und Gesteinen erstellt, die als Referenzen für die Arbeit mit Satellitenbilddaten gelten.
Reflexionskurven weisen allerdings für gleichartige Objekte teilweise Schwankungen auf, die durch die unterschiedlichen Aufnahmeparameter hervorgerufen werden (Laborbedingungen oder Außenmessungen, atmosphärische Einflüsse usw.). Dennoch lässt sich für viele Oberflächenarten ein weitgehend charakteristischer Verlauf angeben, welcher zur Interpretationshilfe der eigenen Reflexionsdaten dient.
Werden nur die Intensitäten der reflektierten Strahlung in eng begrenzten Bereichen des elektromagnetischen Spektrums erfasst, so spricht man von Spektralsignaturen. Diese Signaturen können in spektralen Reflexionskurven als eine Funktion der Wellenlänge dargestellt werden und dienen als Grundlage zur Deutung von Fernerkundungsdaten. Die Abbildung unten zeigt typische spektrale Reflexionskurven für vier Grundtypen auf der Erde: trockenen Boden, Vegetation, klares Wasser und Wasser mit Phytoplankton.
Reflexionskurven für trockenen Boden, Vegetation, klares Wasser und Wasser mit Phytoplankton
Die spektrale Reflexionskurve der Vegetation hat ein Minimum im sichtbaren Teil des elektromagnetischen Spektrums. Die Reflexionswerte nehmen im nahen Infrarotbereich stark zu. Die spektrale Reflexionskurve von trockenem, unbedecktem Boden ist kaum variabel.
Die Reflexionskurve von Wasser ist durch hohe Absorption im nahen Infrarot und darüber hinaus charakterisiert. Wasser mit Phytoplankton absorbiert im sichtbaren Bereich stärker als klares Wasser. Aufgrund dieser Absorptionseigenschaften können Wassermassen sowie Objekte, die Wasser enthalten, leicht identifiziert und abgegrenzt werden.
Spezialkamera, die für die selbsttätige Aufnahme einer großen Anzahl von Einzelbildern ausgelegt ist. Zur Aufnahme von Senkrechtbildern von Flugzeugen aus, insbesondere zur systematischen Aufnahme größerer Flächen, werden im allgemeinen Reihenmesskammern benutzt. Der Begriff impliziert, dass mit diesen Kammern die systematische Aufnahme von Bildreihen möglich ist und die aufgenommenen Bilder für photogrammetrische (Mess-) Zwecke geeignet sind. Da Reihenmesskammern über automatische Auslösevorrichtungen und automatischen Filmtransport verfügen, können Aufnahmen in der von Flughöhe, Objektivbrennweite und Fluggeschwindigkeit abhängigen Zeitfolge aufgenommen werden. Unter der Objektivbrennweite f ist der Abstand zwischen Brennebene (durch das Negativ gegebene Ebene) und dem Projektionszentrum des Objektivs zu verstehen. Das verwendete Filmformat beträgt meist 23 × 23 cm², und die Filmlänge variiert je nach Stärke des Emulsionsträgers zwischen 120 und 210 Metern.
Seit etwa 1920 werden Reihenbildkameras insbesondere bei Luftbildaufnahmen für die Herstellung von Landkarten verwendet. Dabei überfliegt ein Vermessungsflugzeug einen Geländestreifen nach dem anderen. Die Kamera löst die Bilder so aus, dass sie sich um etwa 60 % in Flugrichtung überdecken und als Stereobilder auswerten lassen. Früher erfolgte diese Steuerung visuell mit einem senkrechten Navigationsteleskop, heute mit GPS und computerisiertem Überdeckungsregler.
Die bekanntesten Hersteller von geodätischen Reihenbildkameras waren Carl Zeiss, Oberkochen (INTERGRAPH, Z/I Imaging) mit den Modellen RMK TOP und RMK A, Leica mit den Serien RC10, RC20, RC30 (Wild Heerbrugg) sowie Carl Zeiss Jena mit den Modellen LMK und MRB.
Stark vereinfachter Querschnitt durch eine analoge Reihenmesskamera Quelle: Albertz 2007
Zu Beginn des 21. Jahrhunderts wurde die Produktion filmbasierter Reihenbildkameras eingestellt. Daher werden diese Kammern durch digitale Reihenmesskammern ersetzt. Diese werden vorrangig von INTERGRAPH, Z/I Imaging (DMC), Microsoft/Vexcel (Ultracam) sowie Leica-Geosystems (ADS40 und ADS80) hergestellt.
Engl. clean room; Raum in dem die Anzahl von Schwebepartikeln in der Luft möglichst gering gehalten wird. Reinräume kommen vor allem im Bereich der Halbleitertechnik, sowie in Bereichen der Optik und Medizin zum Einsatz.
Reinräume werden auch in der Raumfahrtindustrie verwendet, um Satelliten oder Subsysteme in staubfreien Umgebungsbedingungen zu integrieren. Ziel dabei ist unter anderem das Risiko von Kratzern, Verschmutzungen oder Beschädigungen durch Staub- und Schmutzpartikel zu minimieren. Dadurch wird späteren Schäden an der Elektronik, optischen Systemen und Thermalkomponenten vorgebeugt. Ein Staubpartikel in einem Schalter oder Schaltkreis kann zum Ausfall z. B. einer Raumsonde führen. Staub auf Spiegeln oder Kameralinsen kann einen Satelliten blind machen und ist deshalb unbedingt zu vermeiden.
Um sicherzustellen, dass die Partikelkonzentration den angestrebten Grenzwert nicht übersteigt, wird kontinuierlich die Luftgüte gemessen. Da stets gleiche Bedingungen herrschen sollten, werden die Parameter Druck, Temperatur und Luftfeuchtigkeit ebenfalls überwacht. Für die Arbeiten in Reinräumen gibt es spezielle Kleidung und spezielles Werkzeug. Beide haben abriebfeste Oberflächen, von denen sich möglichst wenige Partikel ablösen können. Gewöhnlich muss jeder, der einen Reinraum betritt, über eine klebrige Bodenmatte gehen, wodurch der Schmutz von den Schuhen entfernt wird.
Die Belüftung von Reinräumen erfolgt mittels der turbulenten Verdünnungs- oder Mischströmung bzw. der turbulenzarmen Verdrängungsströmung. Bei turbulenzarmen Verdrängungsströmen fließt Luft vertikal oder horizontal durch den Arbeitsraum. Die zuvor mit Schwebestofffiltern gereinigte zuströmende Luft wird entweder durch den Boden oder durch die gegenüberliegende Wand wieder abgesaugt. Ziel ist es, mit einem turbulenzarmen stetigen Luftstrom die im Arbeitsraum befindlichen Schmutzpartikel zu entfernen.
Reinraum im Integrated Technology Centre (ITC) von Airbus D&S in Immenstaad
Die Halle gewährleistet in einem großen Teil die derzeit höchstmögliche Luftgüte von ISO-5. Dies wird durch ein wandhohes Filtersystem ermöglicht, welches das gesamte Luftvolumen des Reinraums (900.000 m³) bis zu 60 mal pro Stunde umwälzt.
Zum Zeitpunkt der Aufnahme (Anfang 2019) befanden sich die zwei Sentinel 6-Satelliten (Vordergrund), Sentinel-2C (senkrecht stehend, rot) und der Satellit EarthCare (Hintergrund, gelb) in der Halle.
Reinräume als Teil von Integrationshallen zur Satellitenfertigung sind kostenaufwendig. Der Bremer Satellitenbauer OHB erstellte beispielsweise bis 2020 eine Halle der Reinraumklasse ISO 8 mit einem Investitionsvolumen von ca. 14 Mio Euro. Airbus D&S hat Anfang 2019 Europas modernstes Satelliten-Integrations- und Raumfahrt-Technikzentrum, das sogenannte Integrated Technology Centre (ITC), offiziell in Betrieb genommen und damit seine Reinraumflächen zum Bau von Satelliten, Sonden, Raumfahrt-Instrumenten und -experimentieranlagen auf 4.200 Quadratmeter verdreifacht. Das hochkomplexe Zentrum ist für rund 45 Millionen Euro in zwei Jahren Bauzeit errichtet worden. Herzstück des ITC ist der große "Cleanroom." Unter Reinraumbedingungen verschiedener "Sauberkeitsklassen" - von ISO 8 bis ISO 5 - findet die Schlussintegration der Satelliten auf einer Grundfläche von rund 2.100 Quadratmetern statt.
Vier so genannte seismische Blöcke, jeder 150 Tonnen schwer, "entkoppeln" spezielle Integrationstische vom Gebäude und sorgen für eine absolut erschütterungsfreie Umgebung für die Montage optischer Instrumente. Eine computergesteuerte Ventilator- und Filtermatrix an der Südseite des Reinraums, erzeugt Luftströmungsprofile, die adaptiv auf die Belegung des Raumes eingestellt werden können. Dieses Konzept ermöglicht erstmalig in Europa die Realisierung unterschiedlicher Reinraumklassen in einer einzigen Halle ohne störende Zwischenwände oder Vorhänge.
Syn. Rektifizierung, engl. rectification; Entzerrung und Georeferenzierung räumlicher Datenbestände durch Korrektur von Bildverzeichnungen bei Fernerkundungsaufnahmen bzw. diversen geometrischen Fehlern bei digitalisierten Geodaten. Es ist der Prozess, mit dem ein Bild aus Bildkoordinaten in Weltkoordinaten konvertiert, d.h. entzerrt und umgerechnet wird.
Geometrische Verzerrungen in Bilddaten können bedingt sein durch z. B. unebenes Gelände, zentralperspektivische Aufnahme oder falsche Orientierung des Aufnahmesystems. Es handelt sich dabei um eine spezielle Form der Georeferenzierung von Bildern. So bearbeitete Fotos heißen digitale Orthofotos (DOP).
Die Rektifizierung von Weltraumaufnahmen bedarf eines etwas komplexeren Prozesses der Umwandlung von Landeskoordinaten, die in großräumigen Gebieten komplizierte mathematische Eigenschaften aufweisen, in ein für die Orthophotoherstellung taugliches Referenzsystem.
Engl. relative air mass; Begriff zur Beschreibung des Einflusses der Atmosphäre auf die Strahlung. Die relative Luftmasse gibt an, wie dick die atmosphärische Schicht ist, die die Sonnenstrahlung bei verschiedenen Zenitdistanzen durchläuft. Es ist eine relative Größe, die auf die Zenitrichtung bezogen wird. Wenn γ die Zenitdistanz der Sonne bezeichnet und m die relative Luftmasse, dann ergeben sich für einen Ort in Meereshöhe folgende Beziehungen:
γ
»
0°
15°
30°
45°
60°
65°
70°
75°
80°
90°
m
»
1,00
1,04
1,15
1,41
2,00
2,36
2,90
3,82
5,60
39,7
Die Zunahme der relativen Luftmasse führt nicht nur zur Verringerung der Bestrahlungsstärke, sondern auch zu einer Veränderung der spektralen Zusammensetzung der Strahlung. Vornehmlich die kurzwelligen (blauen und grünen) Anteile werden überproportional geschwächt, so dass die langwelligen roten Anteile zunehmend überwiegen.
Engl. image registration, franz. transformation relative entre images; nach DIN 18716 ein "Verfahren, durch das die Geometrie eines Bildes auf die eines anderen Bildes abgebildet wird".
Die Remote Sensing Solutions GmbH (RSS) ist in Deutschland einer der führenden Anbieter für Satellitenbildauswertung, Luftbildinterpretation und Photogrammetrie und Geo-Informatik. RSS entwickelt kundenspezifische Lösungen für Fragestellungen in der Agrar- und Forstwirtschaft, in Umweltmonitoring, Naturgefahren und Naturschutz. Zu ihren Kunden zählen kommunale, nationale wie internationale Behörden ebenso wie Auftraggeber aus der Privatwirtschaft.
Dt. Ferngesteuertes Luftfahrtsystem; von der ICAO eingeführte Bezeichnung für unbemannte Luftfahrzeuge, die nicht autonom operieren, sondern von einer Bodenstation aus überwacht und kommandiert werden. In diese Klasse fallen damit die meisten zivil genutzten UAVs. Diese Bezeichnung wird zunehmend bei internationalen Behörden und Gesetzgebern verwendet, z. B. ICAO, Eurocontrol, EASA oder Europäische Kommission.
Dt. Umrechnung, engl. resampling, franz. ré-échantillonnage; in Photogrammetrie und Fernerkundung Verfahren zur Ableitung der Grauwertmatrix bei einer geometrischen Transformation digitaler Bilder. Wesentlicher Bestandteil des Resampling ist die Interpolation der diskreten Grauwerte der Matrix des transformierten Bildes zwischen benachbarten Pixeln des Ausgangsbildes. Die neue Matrix ist geometrisch durch das gewählte Bezugssystem definiert. Ihre Bildelemente sind - wie meist die des Eingabebildes - quadratisch, decken sich aber nicht vollständig mit diesen. Die neuen Bildelemente setzen sich aus Teilstücken von Bildelementen der Matrix des Eingabebildes zusammen. Es muss daher eine Regel eingeführt werden, nach der die Grauwertzuweisung erfolgen soll. Dazu sind drei Resamplingverfahren allgemein verbreitet, die der indirekten Methode zugerechnet werden:
das Nearest-Neighbour-Verfahren (nächste Nachbarschaft), wenn der nächstgelegene Grauwert im Eingabebild übernommen wird,
die bilineare Interpolation, wenn zwischen den vier benachbarten Grauwerten im Eingabenbild in Zeilen- und Spaltenrichtung linear interpoliert wird, sowie
die kubische Konvolution, wenn zwischen den vier mal vier umliegenden Grauwerten im Eingabebild mit Gleichungen dritten Grades interpoliert wird.
Lücken oder Doppelbelegungen, wie sie bei der direkten, umgekehrten Methode auftreten können (aus diesem Grund wird diese inzwischen nicht mehr verwendet), werden hierdurch vermieden.
Resampling wird notwendig im Zuge der Umrechnung eines Rasterdatensatzes auf ein Raster anderer Orientierung bzw. Auflösung.
2003 gestartete Mission der indischen ISRO zu Aufgaben im Ressourcenmanagement, im Agrar- und Forstbereich. Der Satellit mit seiner sonnensynchronen Umlaufbahn in 817 km Höhe (Inklination 98,72°) besitzt eine Umlaufzeit von 102 min und einen Wiederholzyklus von 26 Tagen. Der Linear Imaging Self-Scanning Sensor-4 arbeitet seit 2012 mit verminderter Leistung. Die Mission wurde am 30. September 2013 beendet.
Resourcesat-2 folgte 2011 ins All und ist im Januar 2024 noch aktiv.
Indischer Erdbeobachtungssatellit aus der Indian-Remote-Sensing-Baureihe der ISRO. Er wurde am 20. April 2011 mit einer PSLV-Trägerrakete vom Satish Dhawan Space Centre zusammen mit den Kleinsatelliten YouthSat (Indisch-Russisch, 92 kg) und X-SAT (Singapur, 106 kg) in eine kreisförmige polare und sonnensynchrone Erdumlaufbahn mit einer Bahnneigung von rund 98,7 Grad gebracht. Die Abtrennung von der Rakete erfolgte nach einer Gesamtflugzeit von etwa 1.080 Sekunden in einer Höhe von etwas über 827 Kilometern. Er soll Wissenschaftler bei der Messung der Kontamination von Böden, der Überwachung von Wasserressourcen und der Landnutzung unterstützen, sowie Daten für die Sicherheitsbehörden liefern. Er trägt zusätzlich ein experimentelles Überwachungs und Identifizierungssystem (AIS = Automatic Identification System) für Schiffe, um deren Position, Geschwindigkeit und andere Informationen zu sammeln. Als Lebensdauer werden fünf Jahre erwartet. Der Satellit ist im Februar 2025 noch aktiv.
Der Satellit trägt drei Kameras, die im sichtbaren und im Infrarotbereich arbeiten und eine maximale Auflösung von 5,8 Metern liefern. Sie sind weiterentwickelte Versionen der Kameras, die beim 2003 gestarteten Vorgänger ResourceSat-1 zum Einsatz kamen. So wurde beim hochauflösenden Zeilenscanner LISS-4 (Linear Imaging Self Scanner) die Schwadbreite von 23 auf 70 km erhöht.
Der dreiachsenstabilisierte Satellit ist wie ResourceSat-2 mit drei elektrooptischen Kameras ausgerüstet, die im sichtbaren und im Infrarotbereich arbeiten und eine maximale Auflösung von 5,8 Metern liefern. Sie sind weiterentwickelte Versionen der Kameras, die beim 2003 gestarteten Vorgänger ResourceSat-1 zum Einsatz kamen. So wurde beim hochauflösenden Zeilenscanner LISS-4 (Linear Imaging Self Scanner) die Schwadbreite von 23 auf 70 km erhöht. Gleichzeitig kann die Kamera von LISS-4 für Aufnahmen bis zu 26° aus der senkrechten geschwenkt werden. Die zwei Satelliten (ResourceSat-2 und ResourceSat-2A) im Tandembetrieb verbesserte die Revisit-Fähigkeit von 5 Tagen auf 2-3 Tage.
Die Daten des Satelliten finden ihre Anwendung bei der Unterscheidung von Feldfrüchten und ihrer Überwachung, bei der Abschätzung von Ernteprognosen, im Precision Farming, beim Monitoring von Wasserresourcen, bei der Waldkartierung, beim Ausbau der ländlichen Infrastruktur, beim Katastrophenmanagement und weiteren Einsatzbereichen.
Russischer, hochauflösender Erdbeobachtungssatellit mit zusätzlichen internationalen Forschungsnutzlasten. Der Satellit mit einer Masse von 6800 kg wurde von einer Sojus-U-Trägerrakete am 15. Juni 2006 auf eine elliptische, nicht-sonnensynchrone Bahn gebracht und wurde so nachgeführt, dass er immer im selben Winkel zur Erde zeigt. Er umkreiste die Erde in einer Höhe zwischen 300 km und 600 km mit einer Bahnneigung von 69,9°. Die Mission ist seit 2016 beendet.
Seine Arbeitsschwerpunkte lagen in den Bereichen Land- und Forstwirtschaft, Hydrologie, Umweltmonitoring, (Hydro-)meteorologie, Eis- und Schneebedeckung.
Serie von russischen Fernerkundungssatelliten, deren Missionen inzwischen beendet sind. Die Satelliten operierten in polaren, sonnensynchronenUmlaufbahnen mit einer mittleren Orbithöhe von z.B. 678 km (01-N3) und 835 km (01-N4). Die wesentlichen Erdbeobachtungsinformationen werden mit Hilfe zweier Radiometer ermittelt: Der MSU-E-Sensor ist ein multispektraleroptoelektronischer Radiometer mit hoher Auflösung, der etwa mit den Sensoren auf Landsat vergleichbar ist. Der MSU-SK-Sensor ist ein multispektraler optomechanisches Radiometer mittlerer Auflösung, das die große Lücke hinsichtlich Geländeerfassung und Detailgenauigkeit zwischen SPOT/Landsat TM und NOAA AVHRR schließt.
Resurs-O1
Resurs-O1 war eine Satellitenreihe Russlands und der Gemeinschaft Unabhängiger Staaten. Das Programm wurde 1977 vom Verteidigungsministerium der UdSSR mit dem Ziel initiiert, die natürlichen Ressourcen der Erde zu beobachten und zu überwachen (in Funktion und Zielsetzung ähnlich der Landsat-Serie der USA). Das sehr erfolgreiche frühe Landsat-Programm (mit Starts von LS-1 am 23. Juli 1972, LS-2 am 22. Januar 1975, LS-3 am 5. März 1978) löste diese Reaktion der Sowjetunion aus.
Bezeichnung für eine Serie russischer kommerzieller Erdbeobachtungssatelliten, die hochaufgelöste Bilder liefern können (Auflösung bis 1 m). Die Satelliten werden von Roskosmos als Ersatz für den Satelliten Resurs-DK1 betrieben. Sie sind dazu ausgelegt, multispektraleFernerkundung der Erdoberfläche durchzuführen, um in nahezu Echtzeit qualitativ hochwertige Bilder zu liefern.
Der Start von Resurs-P No.1 erfolgte im Juni 2013, der von Resurs-P No.2 im Dezember 2014 und der von Resurs-P No.3 im März 2016.
In der Raumfahrt die Bezeichnung für Umlaufbahnen, auf der künstliche Satelliten die Erde gegen ihrem Rotationssinn umkreisen.
Der Begriff entstammt der Astronomie, wo man als rechtläufig oder prograd (von lat. pro 'für', 'vor', 'vorwärts' und gradus 'Schritt') Objekte bezeichnet, die in einem rotierenden System der Hauptrotationsrichtung folgen. Entgegengesetzt umlaufende bzw. rotierende Objekte bezeichnet man als rückläufig oder retrograd (lat. retro 'zurück', 'rückwärts').
Die Bezeichnungen werden sowohl für umlaufende Sternsysteme, Planeten, Asteroiden und Kometen verwandt, als auch für in deren Orbit befindliche Satelliten. Ein Objekt mit retrogradem Orbit kennzeichnet man durch eine Bahnneigung zwischen 90° und 270° zu seinem Zentralkörper, ein Objekt mit retrograder Rotation durch eine Achsneigung von 90° bis 270° zu seiner Umlaufbahn.
Retrograde Umlaufbahnen sind bei Satelliten vergleichsweise selten, weil, um sie auf ihre Bahn zu bringen, ihre Beschleunigung relativ zur Erde sie nicht nur auf die Bahngeschwindigkeit (relativ zu einem nichtrotierenden System) bringen, sondern auch die entgegengesetzte Rotationsgeschwindigkeit der Erde überwinden muss und deshalb mehr Treibstoff benötigt.
Israel hat seine Ofek-Aufklärungssatelliten an Bord von Shavit-Startraketen auf retrograde Umlaufbahnen gebracht. Dabei erfolgt der Start von Israels Mittelmeerküste in westlicher Richtung, womit man vermeidet, dass Raketenreste beim Startvorgang auf bewohntes Gebiet stürzen.
Reflektor, der Licht wieder in die Richtung zum Ausgangsort zurückleitet. Drei zueinander orthogonal stehende optische Flächen, realisiert durch Spiegel- oder Prismenflächen, lenken das Licht in die gleiche Richtung zurück. Satelliten, deren Entfernung mit Laserentfernungs-Meßsystemen gemessen werden kann, müssen mit Retroreflektoren ausgestattet sein.
Akronym Raketen-Experimente für Universitäts-Studenten. Das deutsch-schwedische Programm REXUS bietet Studenten die Möglichkeit, wissenschaftliche und technische Experimente auf Raketen unter speziellen Atmosphärenbedingungen durchzuführen.
In der Regel werden jedes Jahr zwei REXUS-Raketen vom SSC, dem ESRANGE Space Center in Nordschweden, gestartet.
REXUS bietet eine experimentelle Plattform im nahen Weltraum für Studierende, die in verschiedenen Forschungsbereichen arbeiten können, darunter Atmosphärenforschung, Strömungsphysik, Magnetfelder, Materialwissenschaften, Strahlungsphysik, Astrophysik, Biologie und auch an Technologiedemonstratoren.
Die einstufige Rexus-Rakete, die von einem verbesserten Orion-Motor angetrieben wird. Mit einer Länge von 5,6 m und einem Durchmesser von 0,356 m kann die Rakete in der Regel eine Nutzlast von bis zu 95 kg (einschließlich Service- und Bergungsmodul) transportieren. Diese Rakete ermöglicht einen etwa 3-minütigen Raumflug und kann Höhen zwischen 78 und 93 km erreichen. REXUS ist flexibel, die Rakete kann während des Fluges gedreht und die Nasenkonus ausgeworfen werden. Darüber hinaus werden alle Experimente nach dem Flug geborgen.
REXUS is a single-stage rocket propelled by an Improved Orion motor Quelle: rexusbexus.net
Engl. RGB colour model; Additives Farbsystem aufgebaut aus den Grundfarben Rot, Grün, Blau. Danach besteht ein Bild aus drei unabhängigen Ebenen in den o.g. Primärfarben. Diese Grundfarben sind reine Spektralfarben mit den Wellenlängen 700 nm (Rot), 546 nm (Grün) und 435 nm (Blau). Eine bestimmte Farbe wird durch die Anteile definiert, die von diesen drei Grundfarben enthalten sind. Ein geometrisches Modell dieses Farbsystems in Raumkoordinaten ist der Farbwürfel.
RGB-Farbmodell
Additives Farbsystem aufgebaut aus den Grundfarben Red, Green, Blue (Rot, Grün, Blau). Das RGB-Farbmodell ist heute das weit verbreiteteste Farbmodell, da es für die Bildschirmdarstellung genutzt wird. Die Farbe wird innerhalb eines Würfels durch Angabe von Koordinaten, d.h. den jeweiligen Farbanteilen bestimmt.
Das RGB-Modell ist heute das weit verbreitetste Farbmodell, da es für die Bildschirmdarstellung verwendet wird. Gängige Farbbildschirme kombinieren diese drei Farbanteile (Kanäle) z.B. in 8 Bit, so dass 255 Farbabstufungen in der Grundfarbe entstehen. Jede Farbe wird durch einen 3-dimensionalen Vektor (z.B. 255/030/215) charakterisiert. Visualisiert wird die so charakterisierte Farbe durch eine additive Mischung der Grundfarben Rot, Grün und Blau (Lichtmischung). Beispielsweise entsteht durch Mischen von Rot und Grün die Farbe Gelb. Addiert man die Grundfarben in ihrer vollen Intensität, so ergeben sie Weiß. Auf einem 32Bit-Rechner lassen sich die Farbinformationen so in 3x8 Bit, also 24 Bit ablegen. Aus der Kombination dieser Farbkanäle entstehen über 16 Mio Farben.
Das Komplementärsystem zum RGB-Modell arbeitet mit CMYK, es wird für Ausgabegeräte wie Plotter und Drucker, sowie in der Druckindustrie verwendet. Der Farbraum des RGB-Farbmodells umfasst wesentlich mehr Farben als der des CMYK-Farbmodells.
In der Raumfahrt Bezeichnung für den Start von Kleinsatelliten oder kleinen Raumsonden zusammen mit Nutzlasten weiterer Kunden mit derselben Trägerrakete. Auf diese Weise können kleine Nutzlasten zu relativ günstigen Preisen transportiert werden. Der Begriff steht in erster Linie für eine Dienstleistung, die Angebot und Nachfrage für Transportkapazitäten in den Weltraum zusammenbringt.
Den Weltrekord (Stand 2017) für die größte Satellitenanzahl in einem Rideshare-Flug hält die indische Raumfahrtbehörde ISRO. Mit dem Start C37 der Rakete PSLV am 15. Februar 2017 brachte sie insgesamt 104 Satelliten ins All.
Den Weltrekord für die größte Satellitenanzahl auf einem Rideshare-Flug hält SpaceX. Mit der Mission „Transporter-1“ brachte das Unternehmen am 24. Januar 2021 insgesamt 143 Satelliten ins All (einschließlich einer mitgezählten Sherpa-Transporthalterung und einem ION-Raumschlepper); dies übertraf den vorherigen Rekord der indischen Raumfahrtbehörde ISRO aus dem Jahr 2017 von 104 Satelliten.
RISAT (Radar Imaging Satellite) ist eine Serie indischer Radar-Aufklärungssatelliten, die von der Indian Space Research Organization (ISRO) gebaut wurden. Sie dienen der Allwetterüberwachung mit Hilfe von Radargeräten mit synthetischer Apertur (SAR).
Die RISAT-Serie ist der erste Allwetter-Erdbeobachtungssatellit der ISRO. Frühere indische Beobachtungssatelliten stützten sich in erster Linie auf optische und spektrale Sensoren, die durch die Bewölkung behindert wurden.
RISAT-1
Der im April 2012 gestartete und im März 2017 außer Dienst gestellte RISAT-1 (Radar Imaging Satellite 1) war die erste von der ISRO (Indian Space Research Organisation) unabhängig entwickelte Satellitenbildmission. Ziel der Mission war die Nutzung von Tag- und Nacht-SAR (Synthetic Aperture Radar) bei jedem Wetter für Anwendungen in der Landwirtschaft, Geologie, Hochwasserüberwachung und mehr. Nach RISAT-2 war dies die zweite Mission der RISAT-Serie.
RISAT-1A
EOS-04, früher bekannt als RISAT-1A, wird von der indischen Raumfahrtbehörde (ISRO) betrieben und wurde 2022 gestartet. Er ist als Nachfolgemission des 2012 gestarteten RISAT-1 vorgesehen und soll bis 2024 seinen Zwillingssatelliten RISAT-1B erhalten. Der EOS-04-Satellit arbeitet im C-Band und kann in den Modi Stripmap, ScanSAR und möglicherweise Spotlight mit einer räumlichen Auflösung von 3 m bis 50 m erfassen.
RISAT-1A und RISAT-1B sind Kopien von RISAT-1, die im Jahr 2022 gestartet wurden bzw. für den Start in den Folgejahren geplant waren. RISAT-1B (EOS-9) ging im Mai 2025 aufgrund eines Ausfalls der dritten Stufe der PSLV-C61-Rakete während des Starts verloren.
RISAT-2
RISAT-2 war ein indischer Radaraufklärungssatellit im Rahmen des Indian Remote Sensing-Programms. Der Satellit wurde am 2009 mit einem Polar Satellite Launch Vehicle von der zweiten Startplattform des Satish Dhawan Space Centre in eine sonnensynchrone Erdumlaufbahn gebracht. Als Sekundärnutzlast transportierte die Trägerrakete den von Studenten gebauten Mikrosatelliten ANUSAT. RISAT-2 wurde von der israelischen Firma Israel Aerospace Industries auf Basis des israelischen Satelliten TecSAR gebaut, welcher im Jahr 2008 gestartet wurde. Hauptnutzlast des Satelliten war ein im X-Band arbeitendes Synthetic Aperture Radar-System mit einer großen schüsselförmigen Antenne, welches Bilder zu jeder Tageszeit und bei jedem Wetter machen konnte und eine Auflösung von bis zu einem Meter erreichen sollte. Als Lebenserwartung wurden drei Jahre angegeben, die er deutlich übertraf. RISAT-2 trat am 30. Oktober 2022 wieder in die Erdatmosphäre ein und verglühte.
Offiziell sollte er dem Katastrophenschutz, der Grenz- und der Überwachung von Dürregebieten dienen, sowie bei der Planung des Städtebaus helfen. Medienberichten zufolge wurde er auch für militärische Aufklärungsaufgaben genutzt. Dies war von indischen Militärs nach den Anschlägen am 26. November 2008 in Mumbai gefordert worden, worauf die Anschaffungspläne beschleunigt und RISAT-2 noch vor RISAT-1 gestartet wurde. Die ISRO dementierte dies.
RISAT-2B
RISAT-2B (Radar Imaging Satellite-2B) ist ein indischer Radaraufklärungssatellit, der gebaut wurde, um RISAT-2 zu ersetzen. Mit dem Start von Risat-2B am 22. Mai 2019 begann der Aufbau einer Konstellation aus moderneren Nachfolgesatelliten. Trotz einer geplanten Lebensdauer von nur fünf Jahren war RISAT-2 zu diesem Zeitpunkt immer noch in Betrieb.
Die RISAT-Konstellation wird von der ISRO betrieben. Die ISRO gibt zwar an, dass die Satelliten zur Unterstützung der Landwirtschaft, der Forstwirtschaft und des Katastrophen-managements eingesetzt werden, doch ihr Hauptzweck ist die militärische Überwachung.
RISAT-2B kann in verschiedenen Modi betrieben werden, darunter in den Bildgebungsmodi Very High Resolution Radar (VHRR) mit einer Auflösung von 1 × 0,5 m und 0,5 × 0,3 m. Der Satellit befindet sich in einer geneigten Umlaufbahn, um eine bessere Überflugrate über das betreffende Gebiet zu erreichen. Als Radarbildsatellit kann RISAT-2B bei Tag und Nacht und unter allen Wetterbedingungen Bilder aufnehmen.
RISAT-2BR1
RISAT-2BR1 ist ein SAR-Satellit, der von der (ISRO) gebaut wurde. Er ist Teil der indischen RISAT-Reihe von abbildenden SAR-Ssatelliten. RISAT-2BR1 wurde am 11. Dezember 2019 an Bord der Trägerrakete PSLV-C48 vom Satish Dhawan Space Centre gestartet.
Russische Trägerrakete für kleinere und mittelgroße Satelliten, entstanden durch die technisch hervorragende Konversion der ehemaligen Interkontinentalrakete SS-19 für die zivile, kommerzielle Nutzung.
Die Gründung des deutsch-russischen Gemeinschaftsunternehmens Eurockot basiert auf dem russisch-amerikanischen START-Abkommen, das die Anzahl der Raketen und Atomsprengköpfe beider Seiten limitiert. Zu den zur Vernichtung bestimmten atomaren Mittelstreckenraketen gehören auf russischer Seite auch die Interkontinentalraketen des Typs UR-100NUTTCh (NATO-Kürzel SS-19). Alternativ zur Verschrottung wurde seinerzeit die Möglichkeit der zivilen oder kommerziellen Nutzung eingeräumt. Da Verschrotten Geld kostet, das Verschießen der Raketen mit Satelliten-Nutzlasten hingegen Geld einspielen kann, lag die Alternative auf der Hand. So gründeten die damalige DaimlerChrysler Aerospace AG (Dasa) und das russische Raumfahrtunternehmen Chrunitschew 1995 die Eurockot Launch Services GmbH mit Sitz in Bremen, um Startdienstleistungen mit der Rockot zu vermarkten.
Hinter der Rockot verbirgt sich die Nutzung der bewährten ersten und zweiten Antriebsstufe der Konversionsrakete SS-19, die mit einer erprobten russischen Oberstufe kombiniert wird. Die Oberstufe ist notwendig, um Satelliten in die gewünschte Umlaufbahn zu bringen. Als Treibstoff verwenden alle Stufen das kostengünstige und gut lagerfähige, jedoch giftige UDMH (unsymmetrisches Dimethylhydrazin) sowie N2O4 (Distickstofftetraoxid) als Oxidationsmittel. Die Rockot ist 29 Meter lang, hat einen maximalen Durchmesser von 2,5 Meter und eine Gesamtmasse von 107 Tonnen.
Die hohe Leistungsfähigkeit des Trägersystems von nahezu 2 Tonnen Nutzlast basiert wesentlich auf der von Chrunitschew entwickelten Oberstufe Breeze-KM, die mit einem mehrfach wiederzündbaren Haupttriebwerk ausgestattet ist. Die genaue Manövrierbarkeit erlaubt, Satelliten in unterschiedlichen Umlaufbahnen zu platzieren. Nach erfolgter Satellitentrennung wird die Breeze-KM gezielt zum Wiedereintritt in die Erdatmosphäre manövriert, um dort zu verglühen.
Die Startrampe für die Rockot-Rakete erfuhr in den letzten Jahren mehrere Umbauten und Modernisierungen.
Trägerrakete Rockot
Grafische Darstellung der ROCKOT-Startrakete mit entfernter Nutzlastverkleidung, um den Hauptsatelliten SMOS darzustellen. Darunter befindet sich der kleinere Satellit Proba-2 innerhalb des doppelten Adapters. Proba steht für PRoject for OnBoard Autonomy.
Die Proba-Satelliten gehören zu den kleinsten, je von der ESA geflogenen Raumfahrzeugen, aber sie haben als Experimentalmissionen eine große Bedeutung im Bereich der Raumfahrttechnik.
Die kommerzielle Ära von Rockot begann mit dem Start des deutsch-amerikanischen Satellitenduos GRACE. Im Jahre 2003 entstand durch die Fusion von EADS Launch Vehicles und Astrium die EADS SPACE Transportation, die nunmehr 51 Prozent Anteile an Eurockot hält. Die restlichen 49 Prozent liegen unverändert bei Chrunitschew. Aus einem deutsch-russischen ist nunmehr ein europäisch-russisches Unternehmen geworden.
Eurockot hat bereits zahlreiche Starts für kommerzielle und institutionelle Kunden aus Europa, Nordamerika und Asien realisiert. 2009 hat Eurockot für die ESA drei Satelliten erfolgreich gestartet: GOCE, SMOS und Proba-2. Mit dem Start des japanischen Satelliten SERVIS-2 von Plesetsk 2010 fand der mittlerweile 10. Eurockot-Start, seit Aufnahme der Geschäftstätigkeit im Jahr 2000 statt. Nach einer weiteren Vereinbarung mit der Europäischen Weltraumagentur ESA wurde 2013 der Launch der drei SWARM-Satelliten durchgeführt. Es folgten die zum Copernicus-Programm der ESA gehörenden ErdbeobachtungssatellitenSentinel-3A (2016), Sentinel-3B (2018), und Sentinel-5P (2017).
Nach dem russischen Einmarsch in die Ukraine erscheint auf der Webseite von Eurockot folgender Text: "eurockot.com is currently not available".
Zahlenwerte, die die direkten Beobachtungsergebnisse eines Messinstruments repräsentieren, und die in digitaler Form in der Reihenfolge, in der sie aufgenommen wurden, übermittelt werden.
Deutscher Röntgensatellit, dem 1990 die zu diesem Zeitpunkt besten Röntgenbilder des Universums gelangen. Als "Spin off" dieser Technik entwickelten Forscher ein Verfahren, mit dem Hautkrebs mit einer Verlässlichkeit von 90 % erkannt werden kann.
Bezeichnung für die hochprioritäre Erdbeobachtungsmission "Copernicus-Radarbeobachtungssystems für Europa im L-Band" (Radar Observation System for Europe in L-band). Mit dem für 2028 geplanten Start wird ROSE-L (aka Sentinel-12") eine kontinuierliche Tag- und Nacht-Allwetterüberwachung von Land, Ozeanen und Eis der Erde ermöglichen und zahlreiche Bilder in hoher räumlicher Auflösung liefern. Seine Lebensdauer ist auf 7,5 Jahre ausgelegt.
ROSE-L wird ein L-Band-SAR (Wellenlängenbereich 20-30 cm) mitführen. Da das gegenüber dem C-Band-Radar des Sentinel-1 längere L-Band-Signal viele natürliche Materialien wie Vegetation, trockenen Schnee und Eis durchdringen kann, wird die Mission zusätzliche Informationen liefern, die von Sentinel-1 nicht erfasst werden können. Sie wird zur Unterstützung der Waldbewirtschaftung, zur Überwachung von Bodensenkungen und Bodenfeuchtigkeit sowie zur Unterscheidung von Kulturpflanzenarten für die Präzisionslandwirtschaft und die Nahrungsmittelsicherheit eingesetzt werden. Darüber hinaus wird die Mission zur Überwachung der polaren Eisschilde und Eiskappen, der Meereisausdehnung in der Polarregion und des saisonalen Schnees beitragen und auch im Katastrophen- und Krisenmanagement eingesetzt werden.
ROSE-L wird sich auf einer sonnensynchronen Umlaufbahn in ca. 690 km Höhe bewegen mit einer Wiederholrate von 6 Tagen und einer Schwadbreite von 260 km. ROSE-L hat eine räumliche Auflösung von 5 - 10 m für die Überwachung von Georisiken und eine Wiederholzeit von drei oder sechs Tagen, je nach Betriebsmodus. Darüber hinaus kann es volumetrische Bodenfeuchtigkeitsprodukte mit einer räumlichen Auflösung von 25 m² bei regionaler Aufnahme und einer Auflösung von 50 m² auf globaler Ebene erstellen. ROSE-L kann auch raumbezogene Karten der Meereisentwicklung mit einer Auflösung von 20 m erstellen.
ROSE-L ist ein 3-Achsen-stabilisierter Satellit, der auf der neuen Produktlinie der Thales Alenia Space Multi-Mission Platform (MILA) basiert. Die Radarantenne wird die größte je gebaute Planarantenne sein, mit Abmessungen von 11 Metern mal 3,6 Metern - ungefähr die Größe von 10 Tischtennisplatten.
Infografik ROSE-L
Während ihrer 7,5-jährigen Lebensdauer wird die ROSE-L-Mission die Bedürfnisse vieler Nutzer erfüllen, einschließlich der Copernicus Land Monitoring and Emergency Management Services der Europäischen Union.
Sie wird wichtige Daten über Bodenfeuchtigkeit, Präzisionslandwirtschaft, Lebensmittelsicherheit, Waldbiomasse und Änderungen der Landnutzung liefern.
Darüber hinaus wird die Mission polare Eisschilde und Eiskappen, die Ausdehnung des Meereises und die Schneedecke überwachen.
Mit einem gesicherten Vertrag im Wert von 482 Millionen Euro ist Thales Alenia Space in Italien der Hauptauftragnehmer für die Mission, während Airbus D&S in Immenstaad für das Radarinstrument verantwortlich ist. Dem Industrieteam gehören 29 Unternehmen (darunter 15 KMU) aus 15 Ländern an. Das DLR in Oberpfaffenhofen ist ein weiterer Hauptbeteiligter in Deutschland.
Der Vertrag für ROSE-L vom 3.12.2020 ist der letzte der sechs neuen hochprioritären Kandidatenmissionen, die unterzeichnet wurden. Die sechs hochprioritären Sentinel-Erweiterungsmissionen im Rahmen von Copernicus sind geplant, um die derzeitigen Fähigkeiten der Sentinels zu ergänzen und die politischen Prioritäten der EU und die Lücken im Bedarf der Nutzer von Copernicus zu schließen.
Am 2. März 2004 mit einer Ariane 5 G+ von Kourou aus gestartete Mission der ESA mit Beiträgen von ihren Mitgliedsstaaten und der NASA zur Erforschung des Kometen67 P/Churyumov-Gerasimenko insbesondere seines Kerns und seiner Umwelt. Die Mission soll die Entstehung von Kometen, wie auch des Sonnensystems und damit auch unsere eigene Entstehungsgeschichte erklären helfen. Sie wurde wie vorgesehen am 30. September 2016 beendet.
Ziel der aus einer Sonde und einem Landeroboter (engl. Lander) bestehenden Mission war ein Rendezvous mit dem ca. 3 x 4 km großen Kometen, der inzwischen von Beteiligten und seit etwa Mitte 2014 auch von den Medien oft in verniedlichender Kurzform Tschuri genannt wird. Der grob einem Quietsche-Entchen ähnelnde Komet hat einen Kern mit einem Volumen von ca. 25 km³ und umkreist die Sonne alle 6,6 Erdjahre in einer Entfernung von 186 Millionen bis 857 Millionen Kilometern.
Um ihr Ziel zu erreichen, musste die Rosetta-Sonde während ihrer ca. 7 Mrd. km langen Reise mit Hilfe von insgesamt vier Swing-by-Manövern in den Schwerkraftfeldern von Erde und Mars Schwung holen. Auf ihrem Weg passierte die Sonde Rosetta zusammen mit ihrem Landemodul Philae auf der 10-jährigen Reise in den Jahren 2008 bzw. 2010 die Asteroiden(2867) Šteins und (21) Lutetia. Nach Erreichen des Kometen 67 P am 6. August 2014 wurde Rosetta in 100 Kilometern Entfernung zu Tschuri auf relative Schrittgeschwindigkeit abgebremst. Die mit vielfältigen Sensoren ausgestattete Sonde umrundete seither den Kometen in wenigen Kilometern Höhe.
Rosetta
Rosetta ist die erste Mission mit dem Ziel, auf einem Kometen zu landen und ihn über längere Zeit aus der Nähe zu erkunden.
Rosetta beim Absetzen des Landers Philae (nicht maßstabsgetreue Darstellung unter Verwendung einer Aufnahme von Tschuri mit der Navigationskamera auf Rosetta)
Am 12. November 2014 gegen 9:35 UTC dockte der Lander Philae in 22,5 Kilometern Höhe von der Raumsonde Rosetta ab und sank auf den Kometen herunter, wo er zunächst um 16:33 UTC und dann nach zwei Sprüngen um 18:26 und 18:33 aufsetzte. Um ein Abprallen zu vermeiden, verfügt Philae über ein komplexes Landesystem mit Dämpfungsmechanismen, zusätzlich sollte sich Philae mit zwei Harpunen und drei Eisbohrern auf der Kometenoberfläche verankern. Dabei kam es zu Fehlfunktionen. Für seine wissenschaftliche Arbeit ist der Lander mit zehn wissenschaftlichen Instrumenten bestückt. Bereits während des Landeanflugs hatte Philae erste Daten gesammelt und via Rosetta über die große Entfernung von 490 Millionen Kilometer zur Erde übermittelt. Nach der Landung auf der Kometenoberfläche nahm Philae verschiedene physikalisch-chemische Messungen vor, unter anderem wird versucht, organische Verbindungen wie etwa Aminosäuren im Kometeneis zu detektieren.
Philae schaltete sich am 15. November 2014 um 1.15 Uhr ab, nachdem er etwa 60 Stunden auf dem Kometen in Betrieb war. Seit dem 12. März 2015 war immer wieder die Kommunikationseinheit auf dem Orbiter Rosetta eingeschaltet, um den Lander zu rufen und seine Antwort zu empfangen. Mitte Juni meldete sich der Lander für kurze Zeit aus seinem Winterschlaf zurück und sendete die ersten Daten zur Erde. Über 300 Datenpakete hat das Team des Lander-Kontrollzentrums des DLR ausgewertet. Man strebt nunmehr an, die Kommunikationsverbindung zu stabilisieren.
Rosetta
Die Meilensteine von Rosettas Reise durch das Sonnensystem
Nach vielen Monaten vergeblicher Versuche, mit Philae Kontakt aufzunehmen, ist nun die Mission des Landers beendet. Auch im Januar 2016 gelang es nicht, via Muttersonde Rosetta in Kontakt mit Philae zu treten. Nun hat sich der Komet 67P so weit von der Sonne entfernt, dass die am Landeplatz eintreffende Sonnenstrahlung nicht mehr ausreicht, die Batterien von Philae für einen Betrieb aufzuladen. Zuletzt war am 9. Juli 2015 für wenige Minuten ein Kontakt zu Philae gelungen, seitdem war nichts mehr zu hören. Philae wurde in der Folge aufgegeben. Erst spät wurde Philae wiedergefunden. Am 2. September 2016 nahm die OSIRIS-Kamera auf der Raumsonde Rosetta die entscheidenden Bilder von der Oberfläche des Kometen 67P/Churyumov-Gerasimenko auf. Sie zeigen den Lander schräg in einer Schlucht liegend, zwei der drei Landebeine deutlich sichtbar. Die Missionsleitung hatte sich inzwischen auf die Muttersonde Rosetta konzentriert. Man ging davon aus, dass sich im September 2016 der Komet so weit von der Sonne entfernt haben würde, dass auch Rosetta nicht mehr genug Energie hätte, ihre Instrumente zu betreiben. Daher plante die ESA, die Sonde im September möglichst sanft auf der Oberfläche des Kometenkerns aufsetzen zu lassen. Die leichte Hoffnung, dass die Sonde sogar die Landung überstehen würde, obwohl sie darauf nicht ausgelegt war, erfüllte sich nicht. Die Sonde funkte am 30. September 2016 um 13:19 Uhr mitteleuropäischer Sommerzeit ihr letztes Signal zur Erde - mit dem Aufprall auf dem Kometen Churyumov-Gerasimenko endete die ESA-Mission. Auf dem Kollisionskurs zum Kometen konnten aber sieben Instrumente noch Daten aufnehmen und zur Erde senden.
Die Kamera OSIRIS nahm bereits seit Sommer 2016 immer wieder Fotos bei nahen Überflügen auf. Auch beim langsamen Abstieg der Sonde in Richtung Kometenoberfläche hatten die Kamera und ihre Datenpakete eine hohe Priorität und zeigte den Kometen aus nur fünf Metern Entfernung. Für Instrument ROSINA, das die Zusammensetzung der Gase bestimmt, waren die Messungen in unmittelbarer Nähe von Churyumov-Gerasimenko ein zusätzlicher Schatz. Als drittes Instrument mit hoher Priorität war RPC (Rosetta Plasma Consortium) eingeschaltet, das die unmittelbare Plasma-Umgebung des Kometenkerns und dessen Wechselwirkung mit dem Sonnenwind erforscht. Darüber hinaus waren aber auch das Mikrowelleninstrument MIRO, das Instrument GAIDA zur Analyse der Staubkörner, das UV-Spektrometer ALICE sowie das RSI-Instrument zur Bestimmung des Gravitationsfeldes aktiv. Die Ergebnisse werden die Wissenschaftler wohl auch noch in den nächsten Jahren beschäftigen.
Da die Beschaffenheit des Kometen vor Eintreffen der Sonde nicht bekannt war, hat Rosetta zunächst seine Oberfläche kartografiert und analysiert. So machte man eine geeignete Landestelle ausfindig, auch wenn im Vorfeld über ihre notwendige Beschaffenheit keine gesicherten Erkenntnisse vorlagen.
Die Sonde ist nach dem Rosetta-Stein benannt, jener Stele aus Granodiorit, die 1799 von einem französischen Soldaten aus Napoleons Armee nahe der Stadt Rosette oder Rosetta (arab. رشيد Raschīd) am Nil entdeckt wurde, und die eine Schlüsselrolle bei der Entzifferung der ägyptischen Hieroglyphen spielte. Entsprechend könnte die Rosetta-Mission der Schlüssel zur Aufdeckung der Rätsel um die Entstehung des irdischen Lebens sein. Philae wiederum ist nach einer inzwischen durch Staumaßnahmen überfluteten Insel im Nil bei Assuan benannt, deren Tempelanlagen des Isis-Heiligtums auf die benachbarte Insel Agilkia verlagert wurden. Dies ist auch der Name des Landeplatzes von Philae, ursprünglich als Site J bezeichnet.
Ursprünglich sollte Rosetta den etwas kleineren Kometen 46P/Wirtanen ansteuern. Wegen technischer Probleme mit der Ariane-Rakete verstrich das Startfenster, worauf die Missionsplaner 67 P/Churyumov-Gerasimenko als neues Ziel auswählten.
Philaes Abstieg auf den Kometen 67P/Churyumov–Gerasimenko, beobachtet von Rosettas Kamera OSIRIS
Als Lander Philae am 15. November 2014 um 1.36 Uhr in den Ruhezustand ging, hatte er mit Hilfe seiner Primärbatterie etliches geleistet: Über 500 Mio. km entfernt von der Erde hatte das Mini-Labor mit zehn Instrumenten an Bord nach der Atmosphäre geschnüffelt, gebohrt, gehämmert und den Kometen durchleuchtet. Dabei hatte er nach einer dreifachen Landung und einem neuen, ungeplanten Standort nicht die günstigsten Voraussetzungen. Mehr als 60 h arbeitete Philae dennoch kontinuierlich und schickte bei jeder Funkverbindung Daten.
Der wissenschaftliche Leiter des DLR-Projekts, Dr. Ekkehard Kührt, ist mit den bisherigen Ergebnissen sehr zufrieden. "Wir haben viele wertvolle Daten gesammelt, die man nur in direkter Berührung mit dem Kometen erhalten kann. Zusammen mit den Messungen der Rosetta-Sonde sind wir auf einem guten Weg, Kometen besser zu verstehen. Ihre Oberflächeneigenschaften scheinen ganz anders zu sein als bisher gedacht!"
Philaes Abstieg auf den Kometen 67P/Churyumov–Gerasimenko, beobachtet von Rosettas Kamera OSIRIS Quelle: NASA
Airbus Defence and Space Deutschland war Hauptauftragnehmer für die Rosetta-Mission und verantwortlich für den Bau der Sonde. Philae wurde von einem internationalen Konsortium unter Leitung des Deutschen Zentrums für Luft- und Raumfahrt (DLR), MPS, CNES und ASI entwickelt und gebaut.
Engl. Akronym für Russian Federal Service for Hydrometeorology and Environmental Monitoring; russisches Bundesamt für Niederschlagsmeteorologie und Umweltbeobachtung.
Raumfahrtbehörde der russischen Föderation. Die Agentur ist für das zivile Raumfahrtprogramm des Landes zuständig und hat ihren Sitz im Sternenstädtchen nahe Moskau. Sie wurde 1992 nach der Auflösung der Sowjetunion und Gründung der russischen Föderation gegründet und hat die wesentlichen Ressourcen der sowjetischen Raumfahrt übernommen. Frühere Namen der Agentur sind RKA (Rossijskoje Kosmitscheskoje Agenstwo), RAKA (Rossiiskoje Awiazionno-Koswitscheskoje Agenstwo) und Rosaviakosmos.
Roskosmos benutzt aktuell zwei Raumfahrtbahnhöfe: Plessezk bei Archangelsk in Russland, das von der russischen Föderation langfristig zur Hauptbasis ausgebaut werden soll, sowie Baikonur in Kasachstan, die Hauptbasis der sowjetischen Raumfahrt. Für die Nutzung von Baikonur müssen auf Basis eines Pachtvertrages Gebühren an Kasachstan bezahlt werden. Als mögliche Alternative zu Baikonur wurde Swobodny im fernen Osten Russlands in Betracht gezogen. Eine Vielzahl von Raketenstarts erfolgte auch vom Startkomplex Kapustin Jar an der Wolga.
Lange Zeit unterhielt die russische Raumfahrtbehörde die Raumstation Mir, die sich trotz Finanzierungsschwierigkeiten sogar acht Jahre länger als vorgesehen im Dienst befand. Sie wurde schließlich am 23. März 2001 aufgegeben, da man sich auf die Internationale Raumstation (ISS) konzentrieren wollte.
Russland beteiligt sich jetzt maßgeblich an der ISS, zu deren Versorgung, insbesondere nach der Verzögerung und schließlich der Beendigung des Space-Shuttle-Programms, die Sojus-Rakete mit dem Sojus-Raumschiff und dem Progress-Raumtransporter eingesetzt werden.
Roskosmos ist inzwischen Vollmitglied des Consultative Committee for Space Data Systems (CCSDS), einer internationalen Organisation, in der sich die führenden Weltraumorganisationen zusammengefunden haben mit der Aufgabe gemeinsame Methoden des Datenverkehrs mit Raumfahrzeugen, vornehmlich von Forschungssonden auszuarbeiten.
Engl. spheroid; Ellipsoid, das durch die Drehung einer Ellipse um eine ihrer Achsen entsteht. Im Gegensatz zu einem allgemeinen Ellipsoid sind zwei Achsen gleich lang. Man unterscheidet dabei je nach Länge der Drehachse das
abgeplattete (oblate) Ellipsoid bei Rotation um die kleine Achse und das
verlängerte (prolate) Ellipsoid bei Rotation um die große Achse.
Die meisten größeren Himmelskörper sind angenähert abgeplattete Rotationsellipsoide. Sie entstehen durch die Fliehkraft, die bewirkt, dass ein kugelförmiger Körper verformt wird. An den Polen, also den Durchstoßpunkten der Rotationsachse, werden diese Körper abgeplattet, am Äquator entsteht eine Ausbauchung. Besonders deutlich ist die Abplattung bei der Sonne und den großen Gasplaneten Jupiter und Saturn ausgeprägt, weil sie besonders schnell rotieren und nicht verfestigt sind. Aber auch die Erde und die anderen terrestrischen Planeten werden durch die bei der Rotation entstehenden Fliehkräfte zu Rotationsellipsoiden verformt. Der in zehn Stunden rotierende Jupiter ist um etwa 1/16 abgeplattet, die Erdabplattung beträgt 1/298.
Rotationsellipsoid und Massenverlagerung (rot) Quelle: Wikipedia
oblates (abgeplattetes) Rotationsellipsoid
prolates (verlängertes) Rotationsellipsoid
In der Geodäsie, Kartographie und den anderen Geowissenschaften werden Rotationsellipsoide als geometrische Annäherung an das (physikalische) Geoid benutzt. Diese Rotationsellipsoide dienen dann als Referenzfläche, um die Lage bzw. Höhe von Objekten der Erdoberfläche anzugeben. Man spricht dann von einem Referenzellipsoid. Die Abweichungen zwischen Geoid und Rotationsellipsoid werden als Geoidundulationen bezeichnet. Beide dienen in der Geophysik als Grundlage für Berechnungen des Schwerefelds der Erde.
Engl. red edge; Bezeichnung für den raschen Anstieg des Reflexionsgrads von gesunder grüner Vegetation im Wellenlängebereich von 690-730 nm. Ab diesem Bereich absorbieren die Blattpigmente nicht mehr.
Da die rote und die nahe infrarote Region benachbart sind (rot umfasst ca. 600 bis 700 nm und nahes Infrarot beginnt bei ca. 700 nm und endet bei ca. 1200 nm), wird die geringe Vegetationsreflexion des roten Bereichs direkt von einem starken Anstieg auf die hohe Reflexion im nahen Infrarot gefolgt.
Der Red Edge-Gradient besitzt große Bedeutung bei der Auswertung von Bilddaten für eine Vegetationsanalyse. Er kommt u.a. bei der Entwicklung von sog. Vegetationsindizes zum Tragen, die z.B. zur Identifizierung des Vitalitätsgrades von Pflanzen ausgenutzt werden.
Rote Kante bei unterschiedlicher Chlorophyllkonzentration
Die Kurven bezeichnen die Reflexion drei ähnlicher Pflanzenkronen. Den Unterschied zwischen den Dreien bildet die Chlorophyllkonzentration. Die rote, die gelbe und die grüne Linie gehören zu Pflanzen, die eine geringe (rot), eine mittlere (gelb) und eine hohe (grün) Chlorophyllkonzentration besitzen.
Je höher die Chlorophyllkonzentration, desto größer die Absorption im roten Bereich, und desto geringer die Reflexion. Zusätzlich gewinnt die Absorptionsmulde (die Fläche, in der die Absorption stattfindet) an Breite. Dies verschiebt die rote Kante zu höheren Wellenlängen (in Richtung des nahen Infrarot) und ihr Anstieg verliert an Steigung.
Rückstreuung (engl. backscatter, fr. rétrodiffusion) bezeichnet den Anteil einer Welle oder eines Partikelstroms, den ein getroffenes Objekt in die Richtung der Quelle zurückwirft.
Wenn z. B. ein Radargerät Mikrowellenimpulse ausgestrahlt hat, wird die Stärke gemessen, mit der das Objekt das Signal reflektiert.
Die Radarrückstreuung ist abhängig von
der Oberflächenbeschaffenheit des Objektes (Geometrie, elektrische Leitfähigkeit, spektrale Merkmale),
der Einfallswinkel, Wellenlänge und Polarisation
Durch die Rückstreuung von aktiven satellitenbasierten Streusignalen (Radar) sind beispielsweise Windmessungen über der Ozeanoberfläche möglich. Die Rauheit der Meeresoberfläche ist proportional zur Oberflächengeschwindigkeit des Windes, und die Wellenrichtungen ermöglichen Rückschlüsse auf die Windrichtung. Durch die Rückstreusignale polarisierter elektromagnetischer Pulse von sogenannten Scatterometern kann die Rauheit und Orientierung der Meereswellen gemessen werden.
Eine Messung von Niederschlag in der Atmosphäre ist durch die Rückstreuung von Radar-Signalen möglich. Die Radar-Reflektivität ist dabei proportional zur Größe und Anzahl der in der Atmosphäre vorhandenen Tropfen (sog. Hydrometeore).
 von Feldern in Rio Grande do Sul, Brasilien vom 12. 4. 2020 (Planet)")

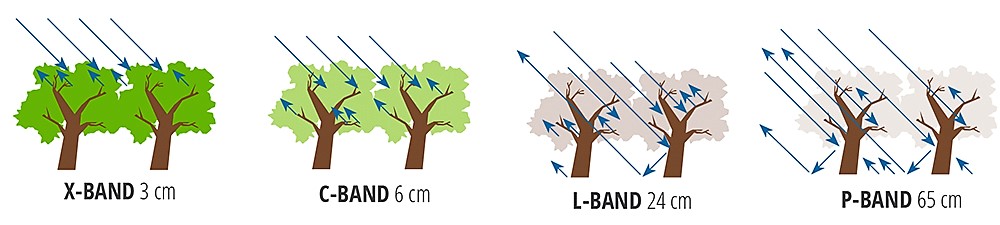
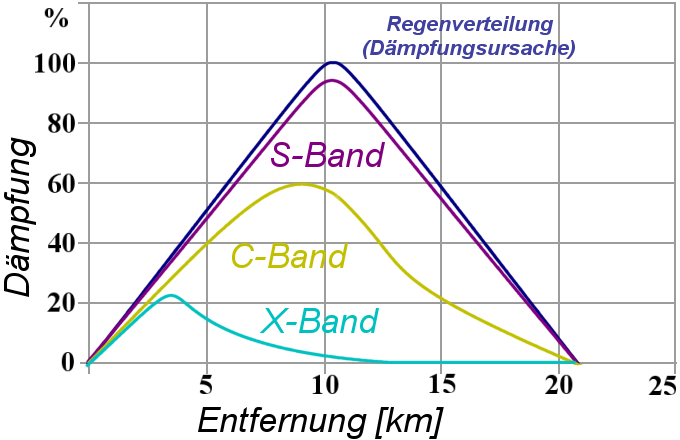
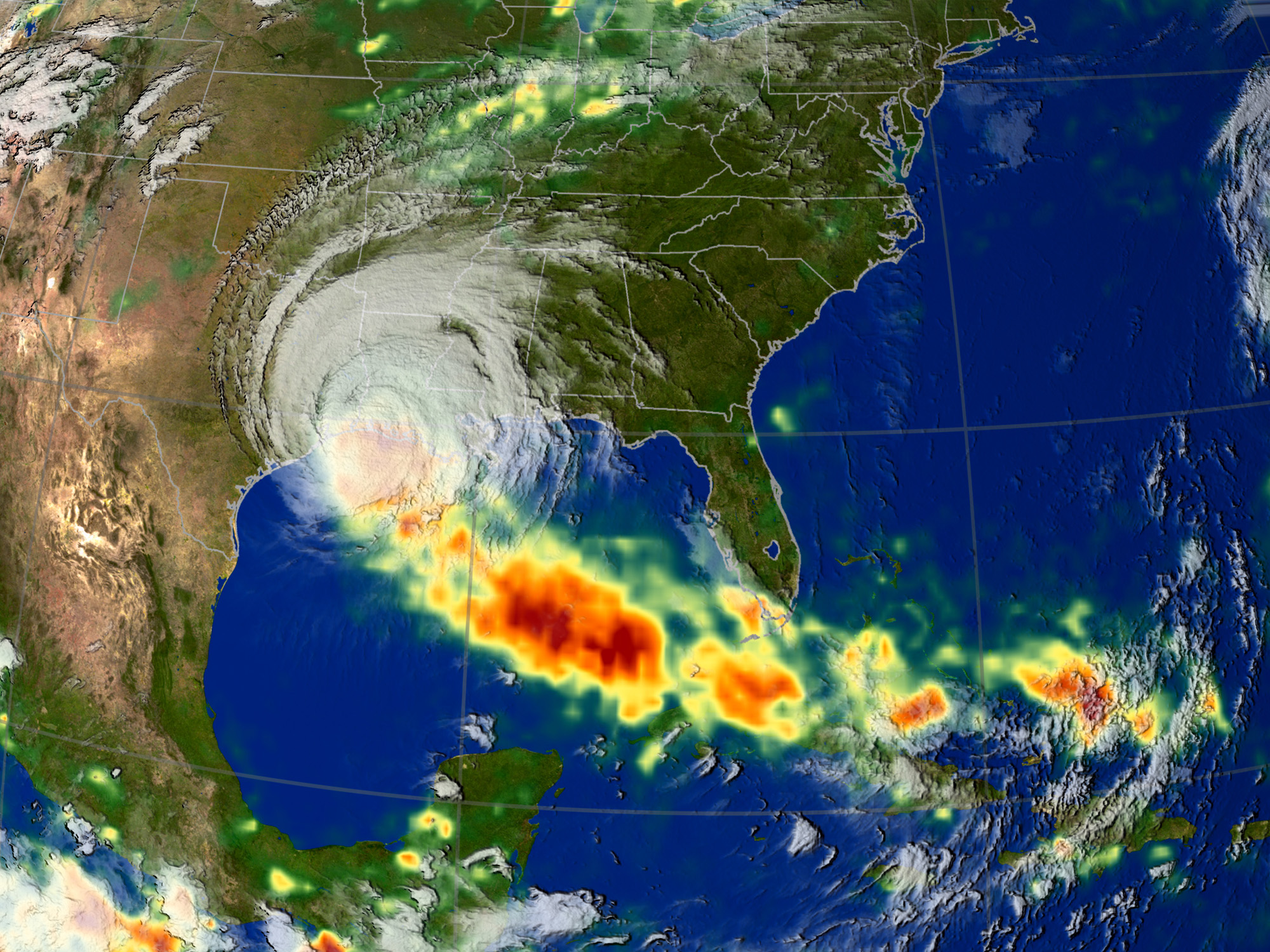

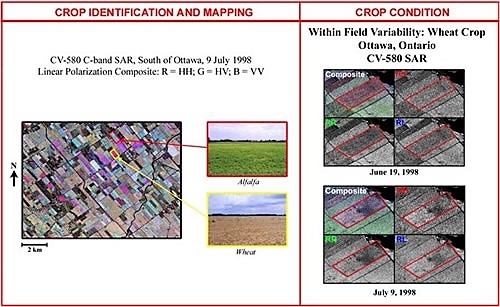
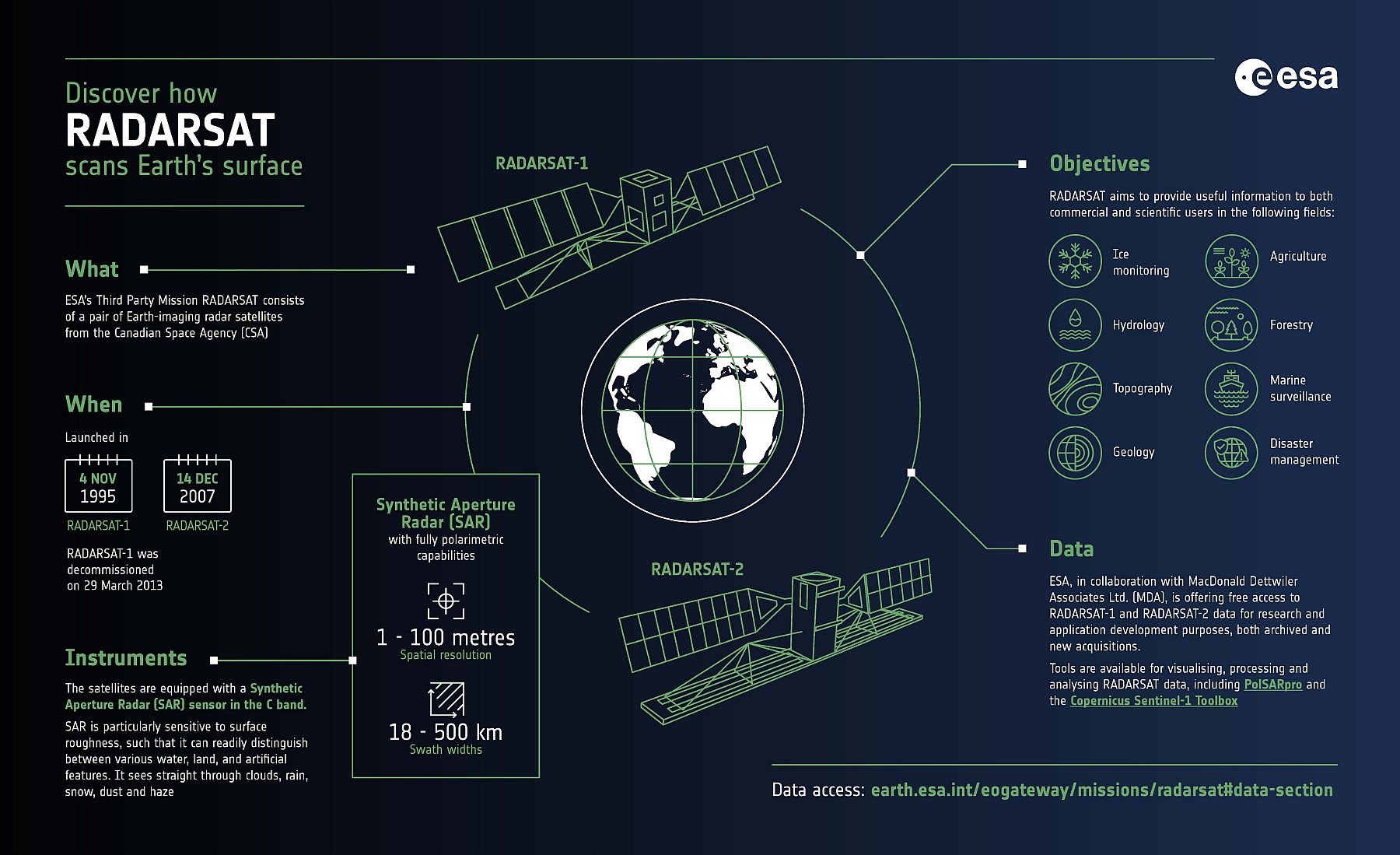
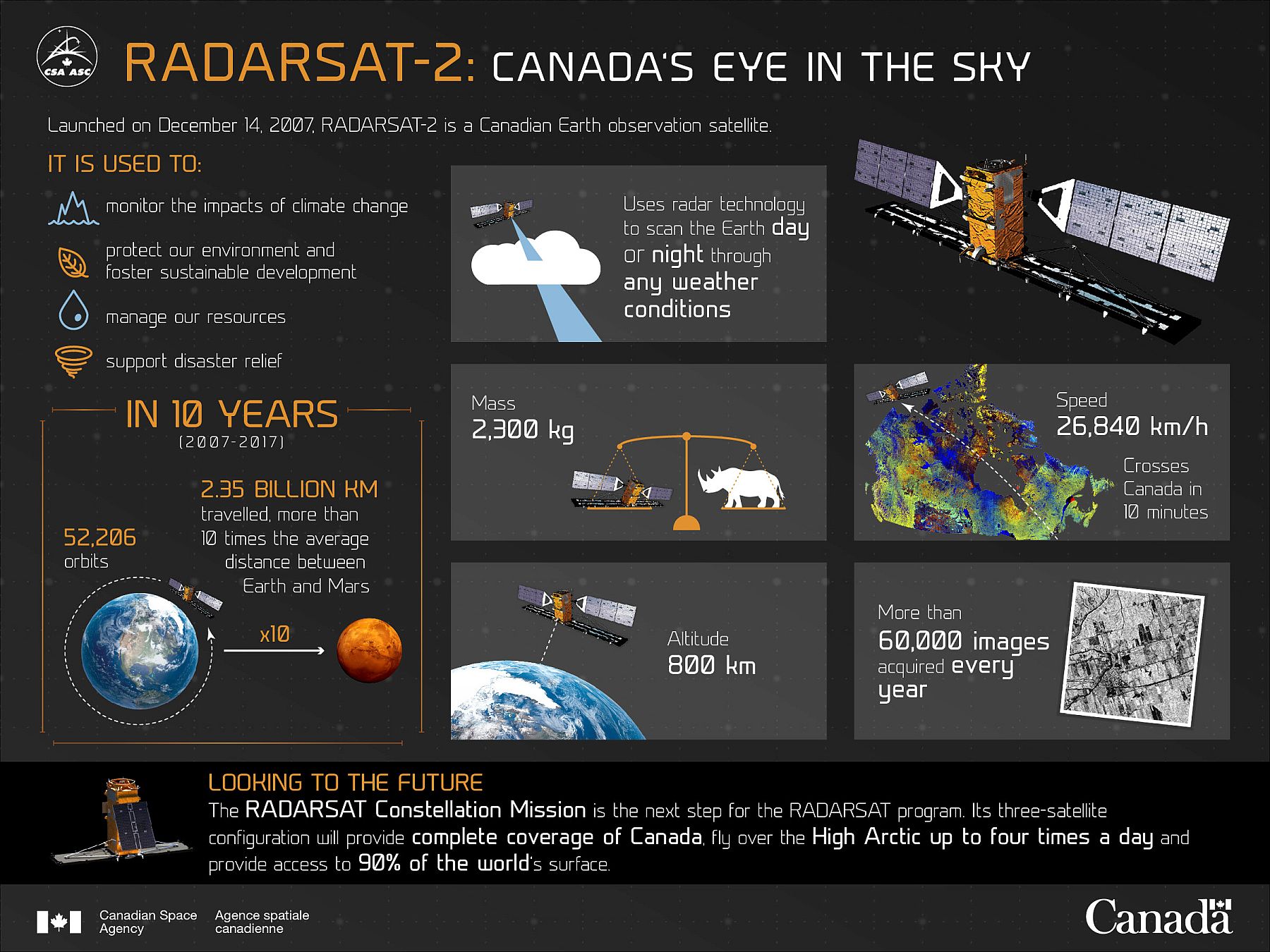
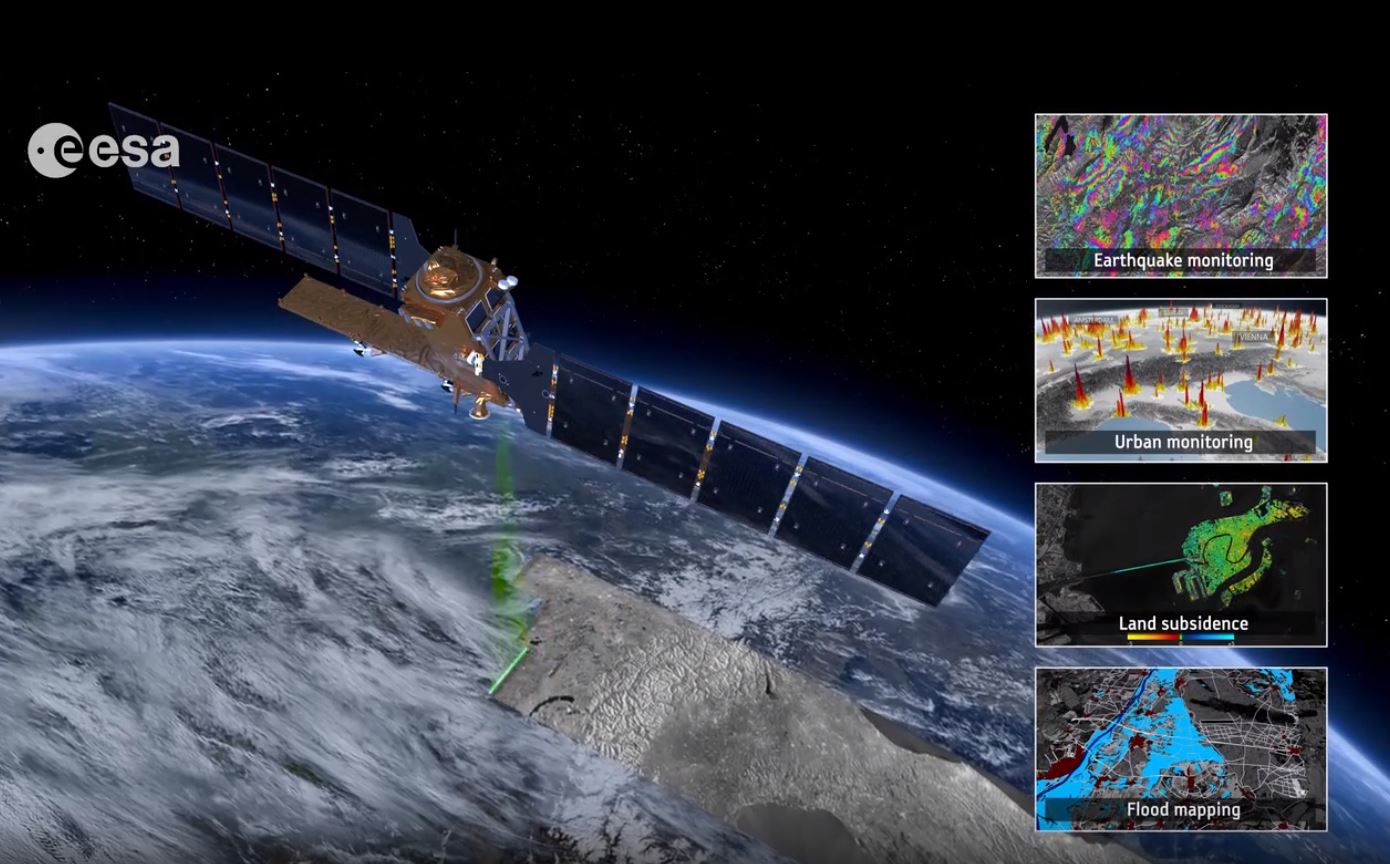
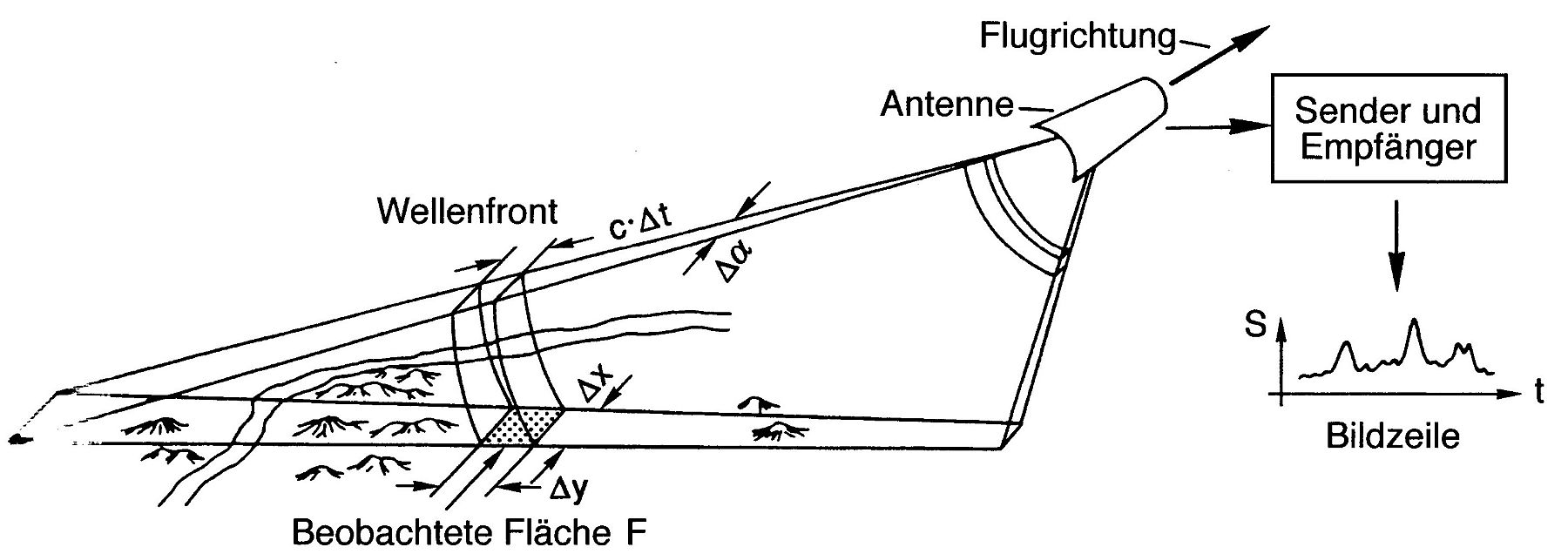
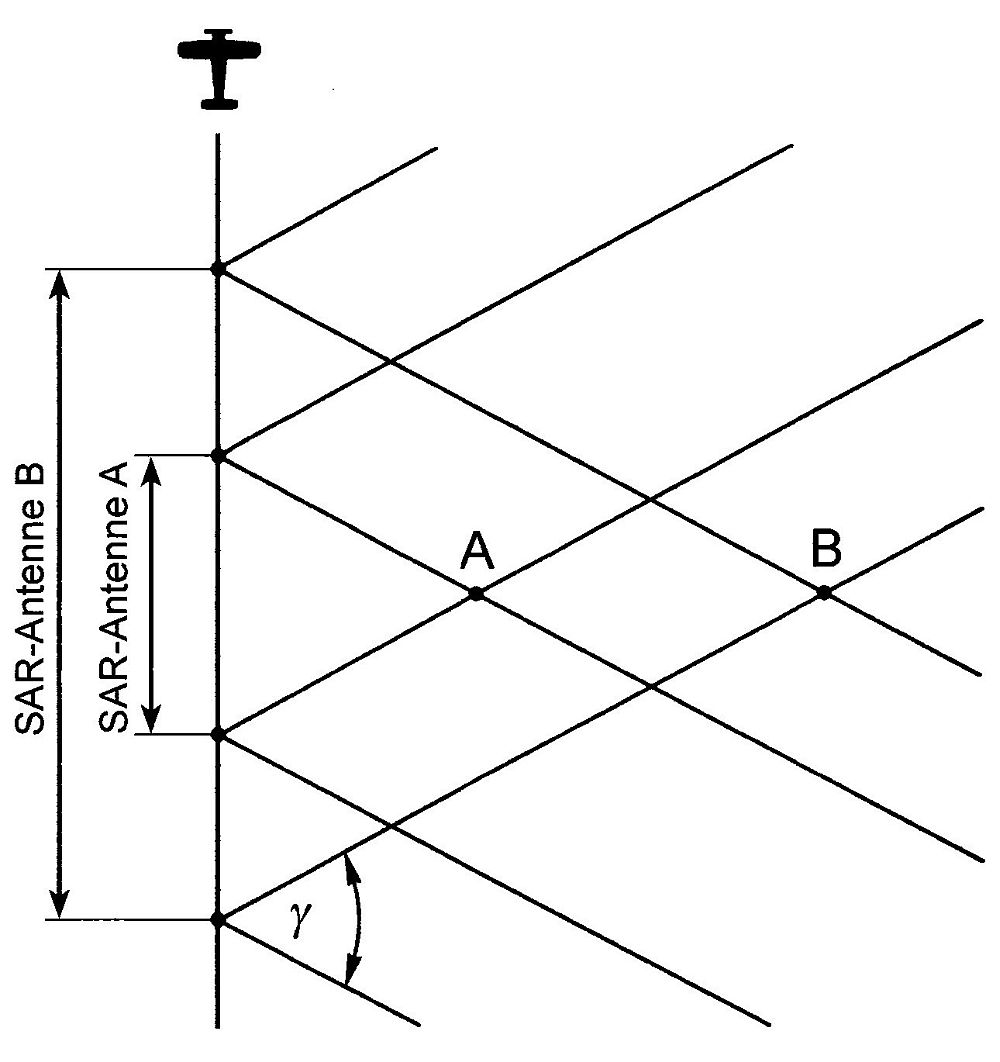
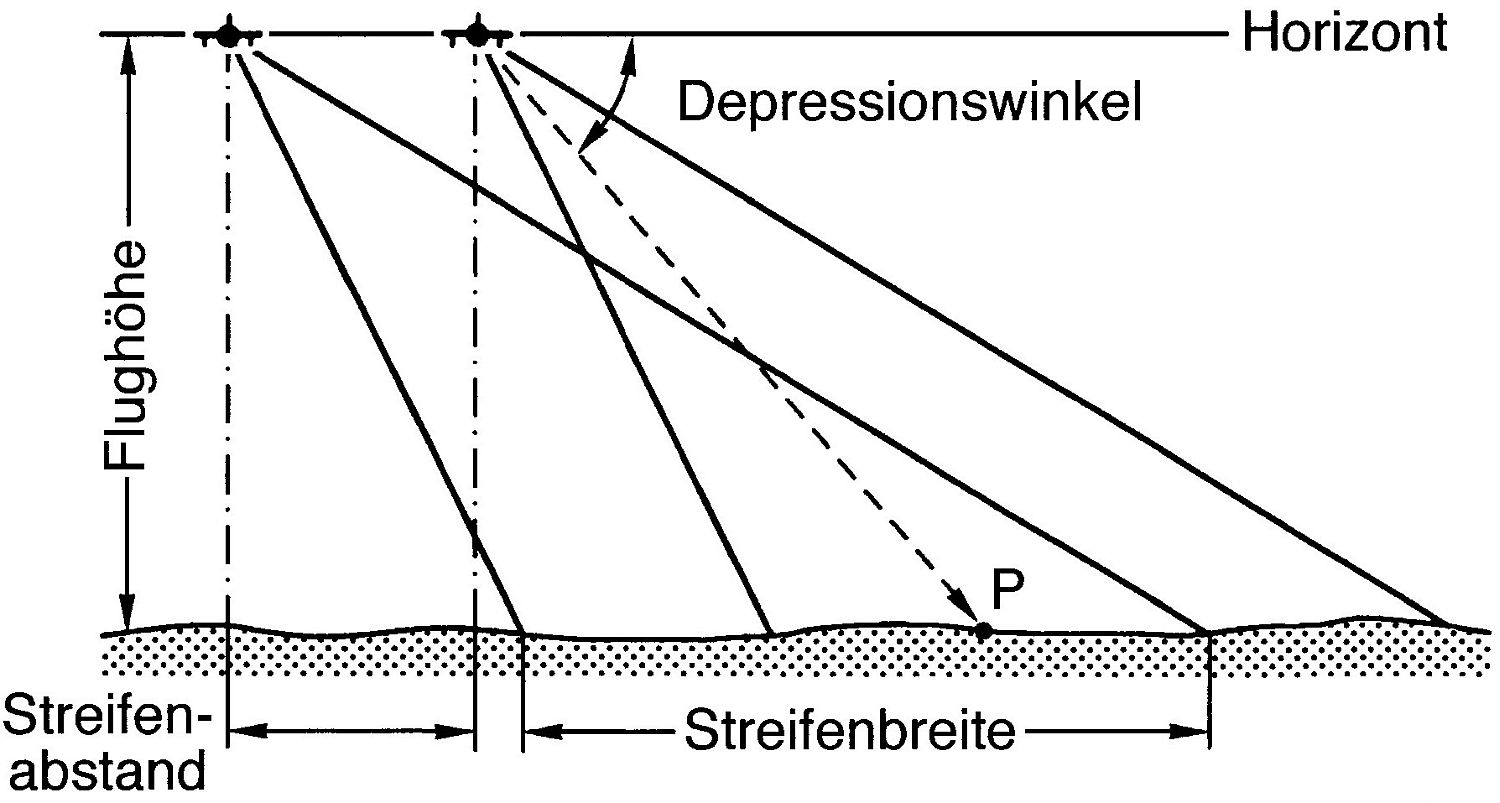
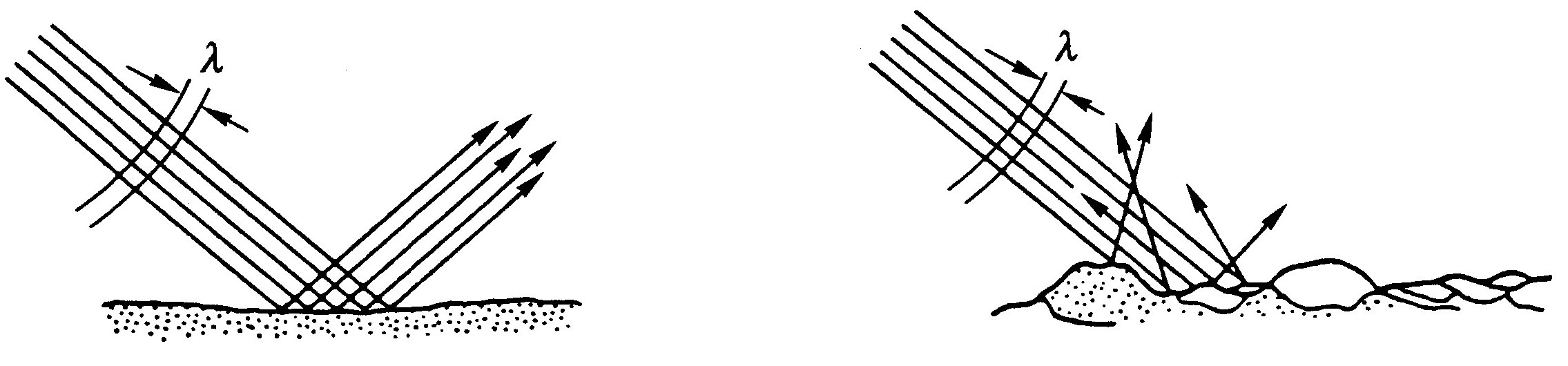
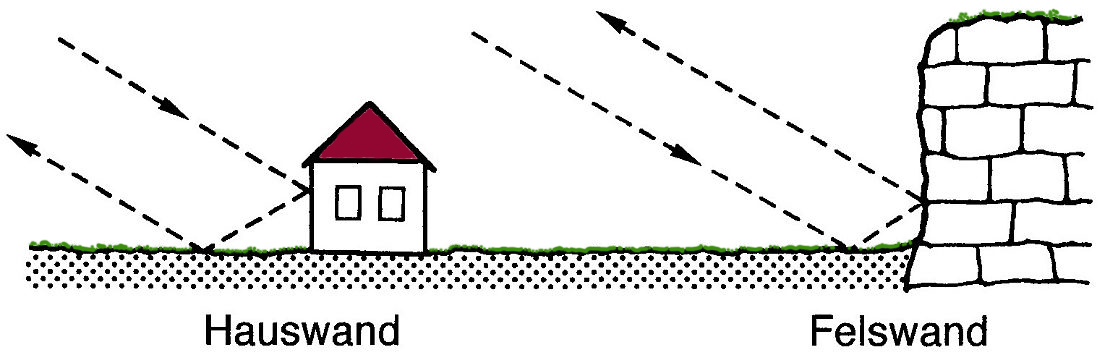
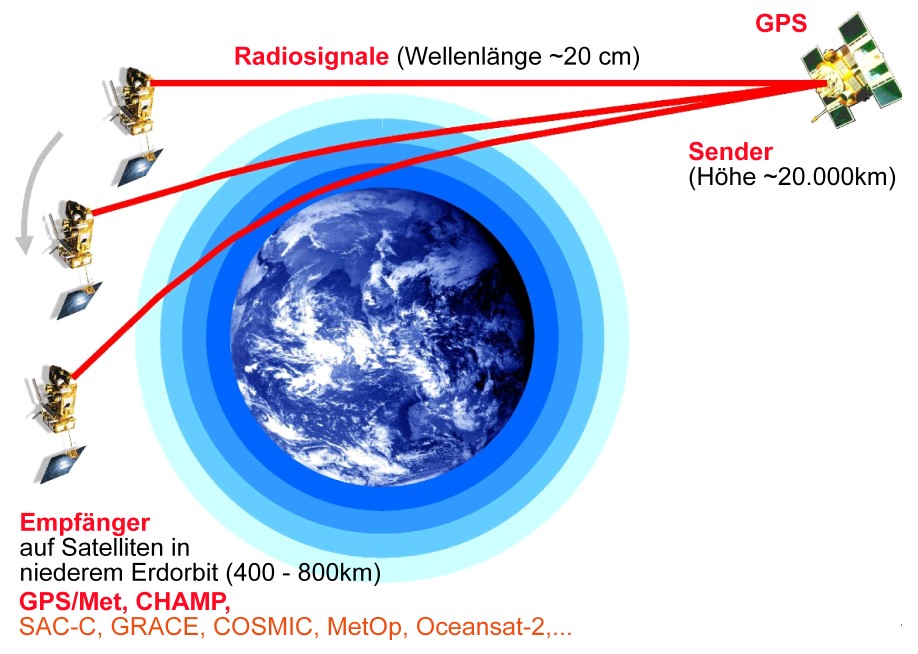
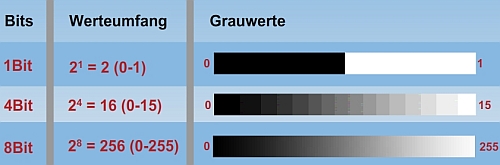

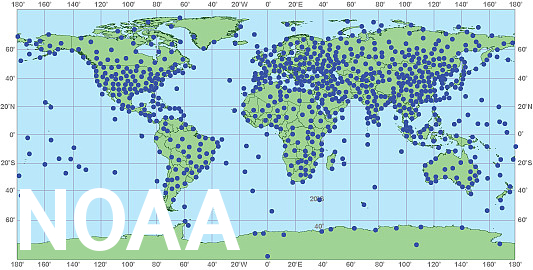





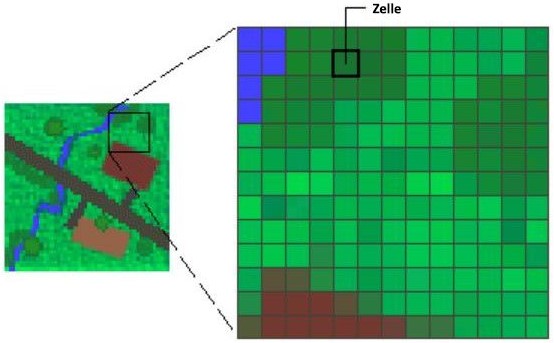
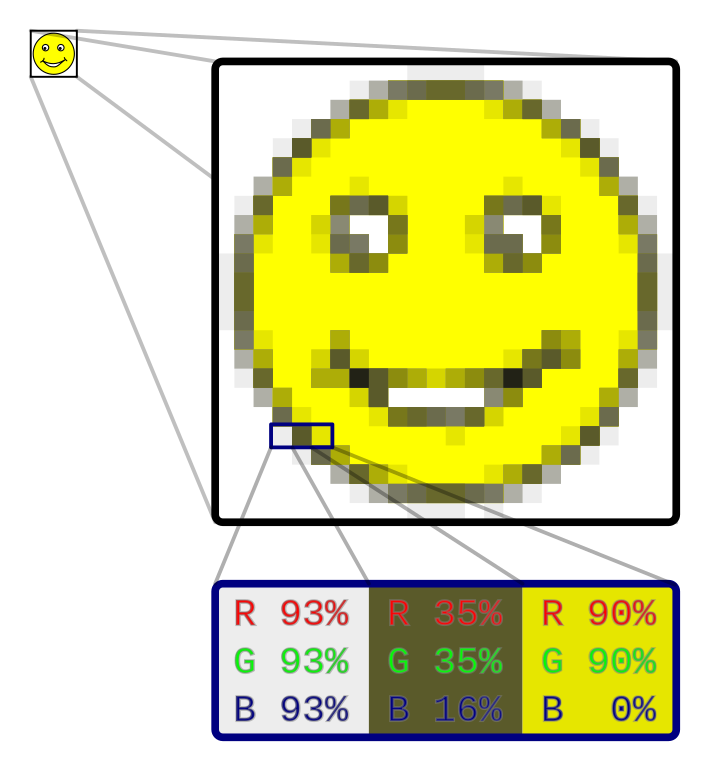

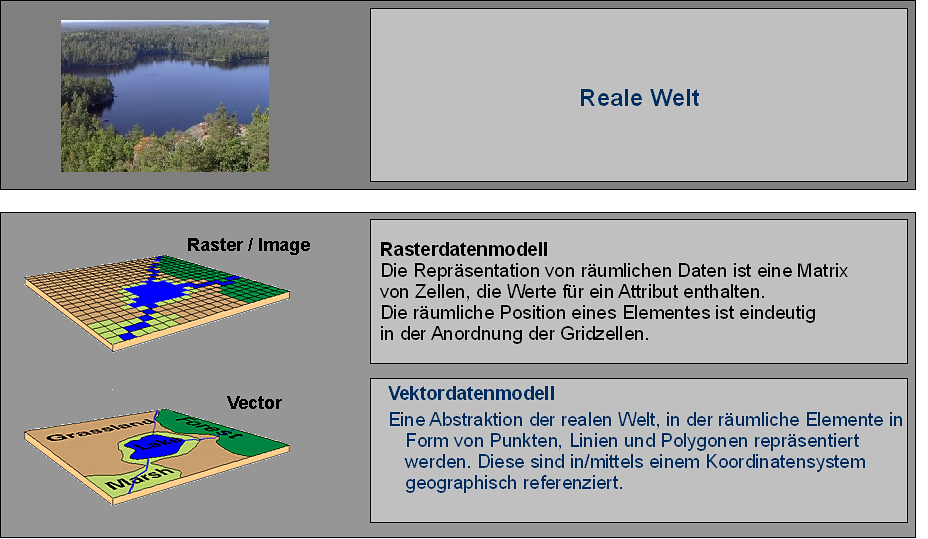
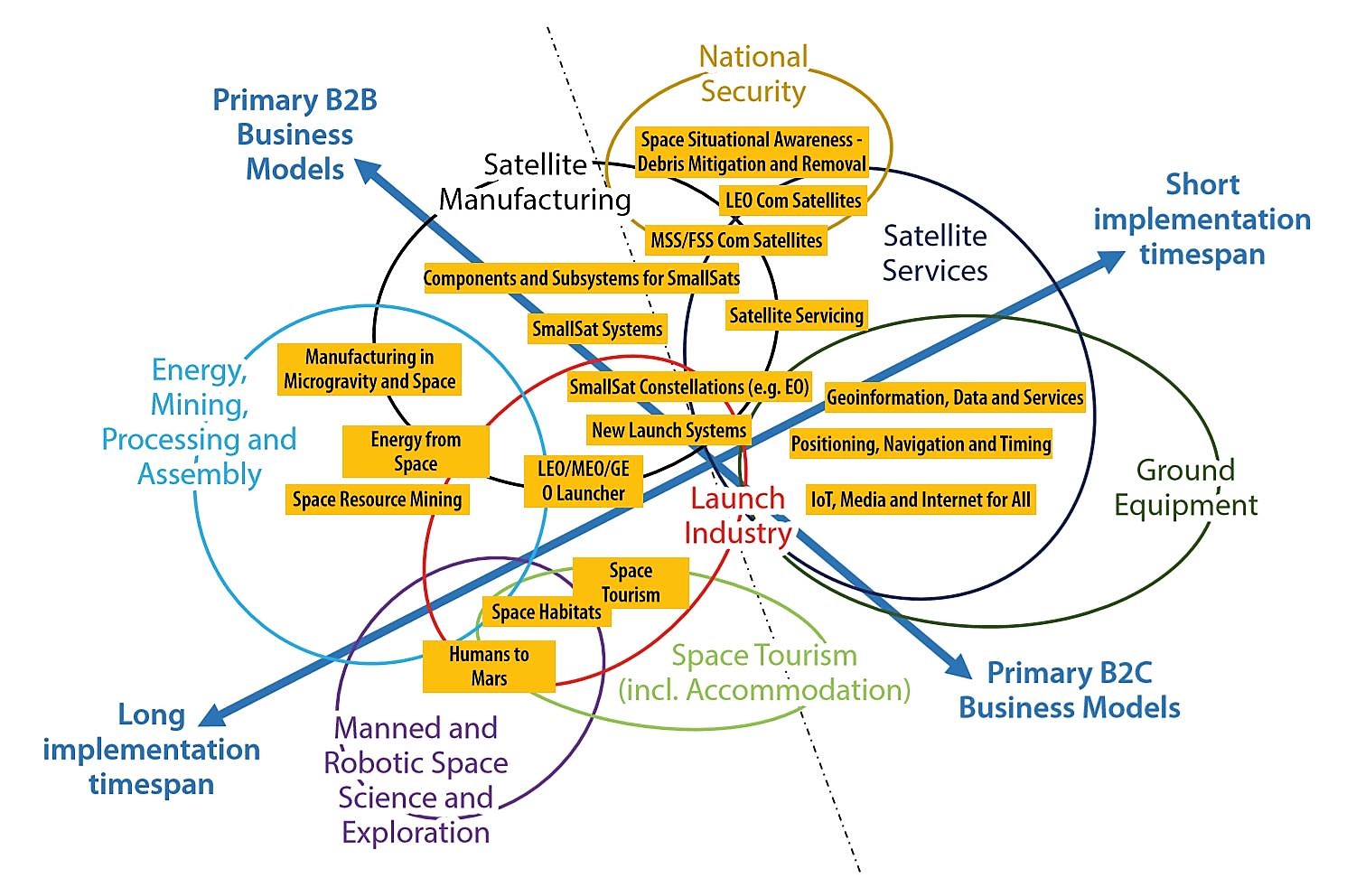
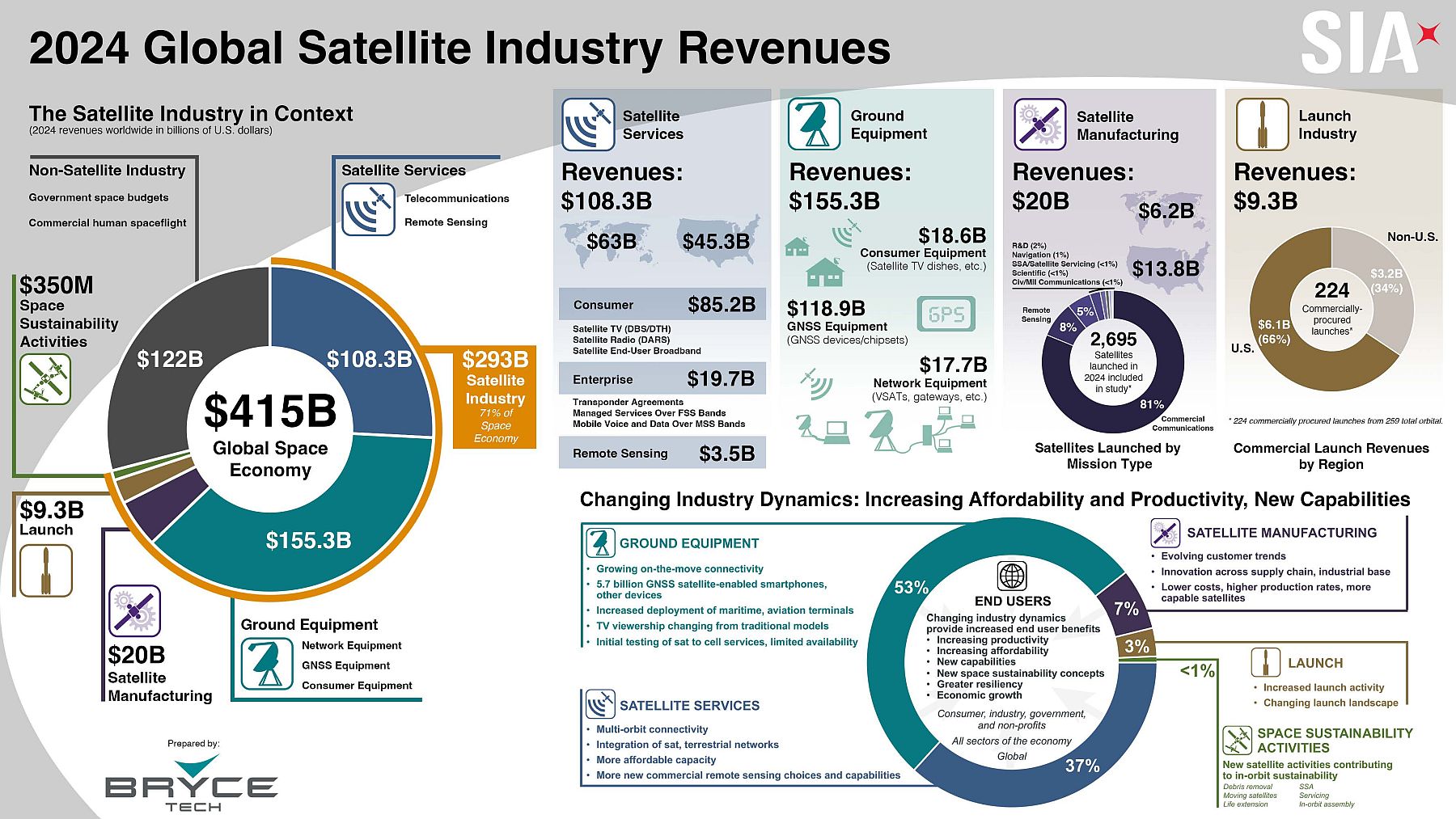
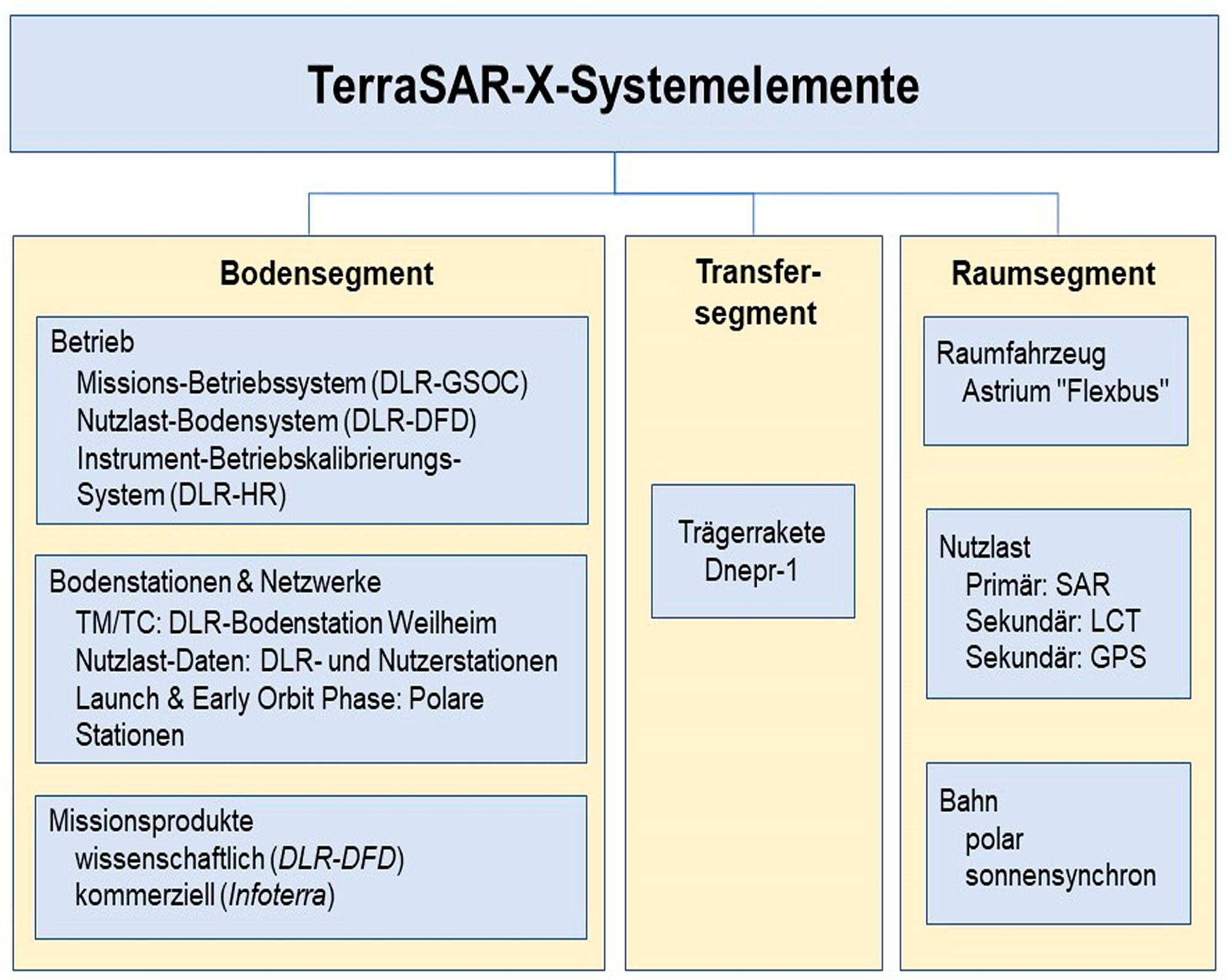
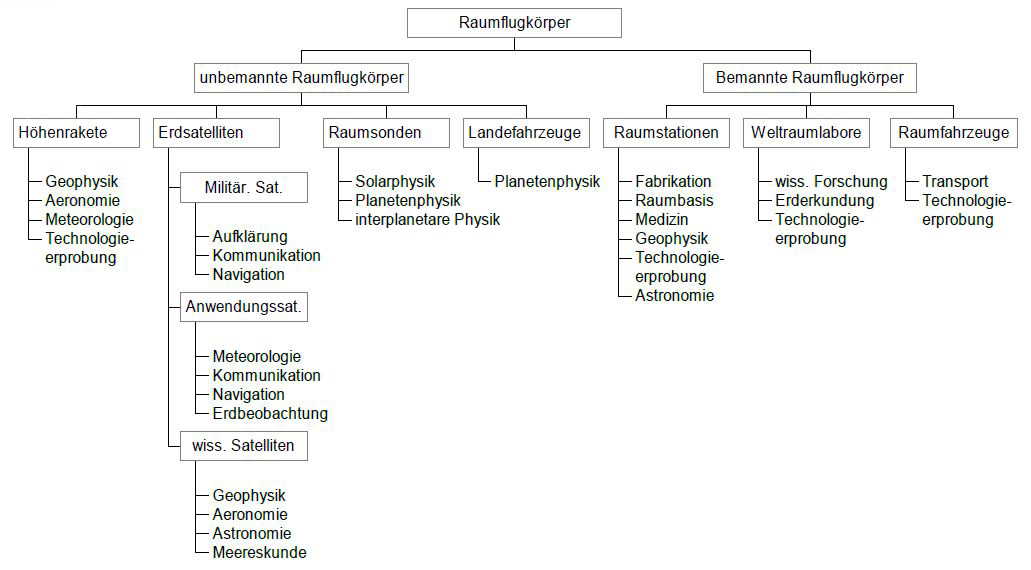
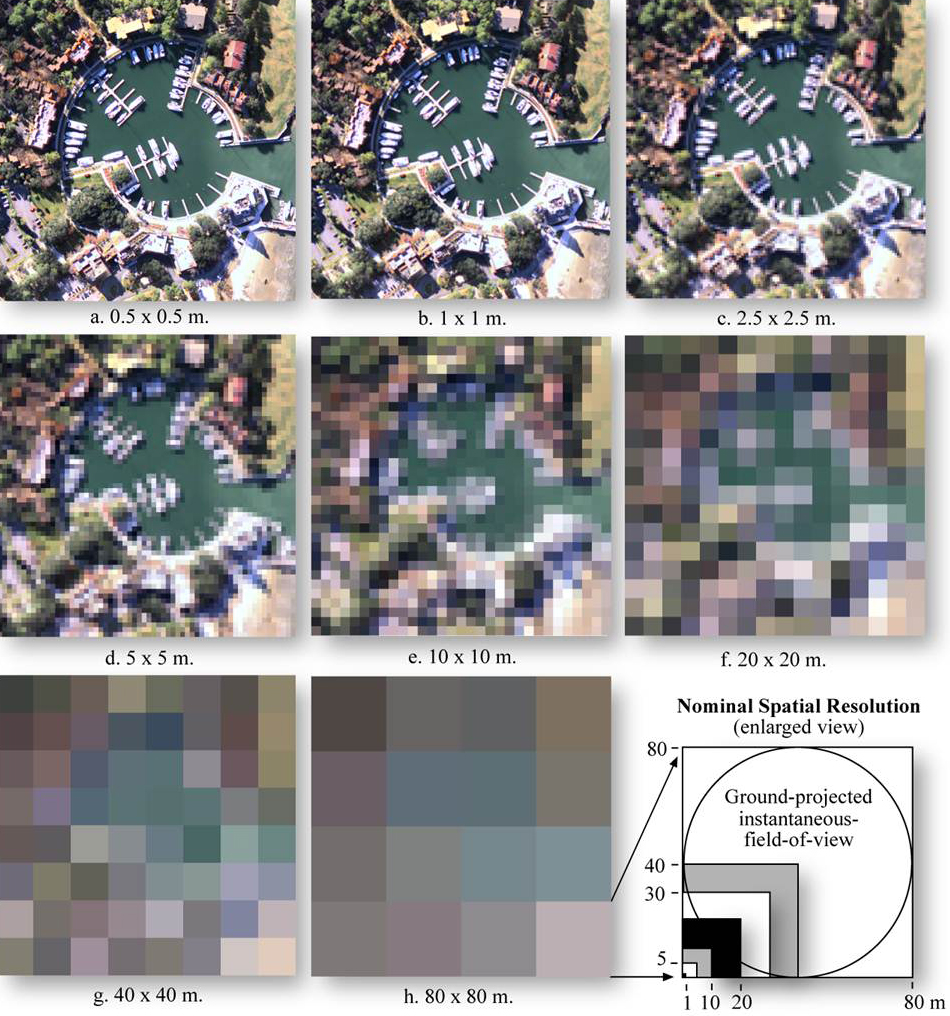
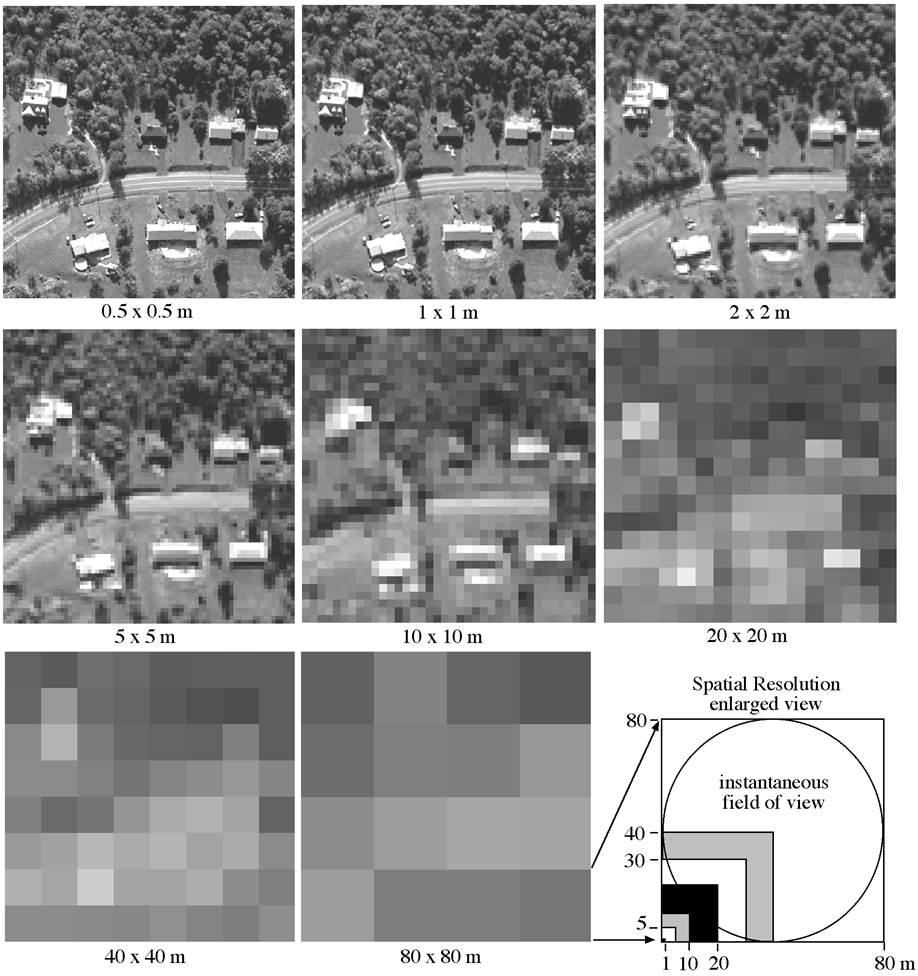
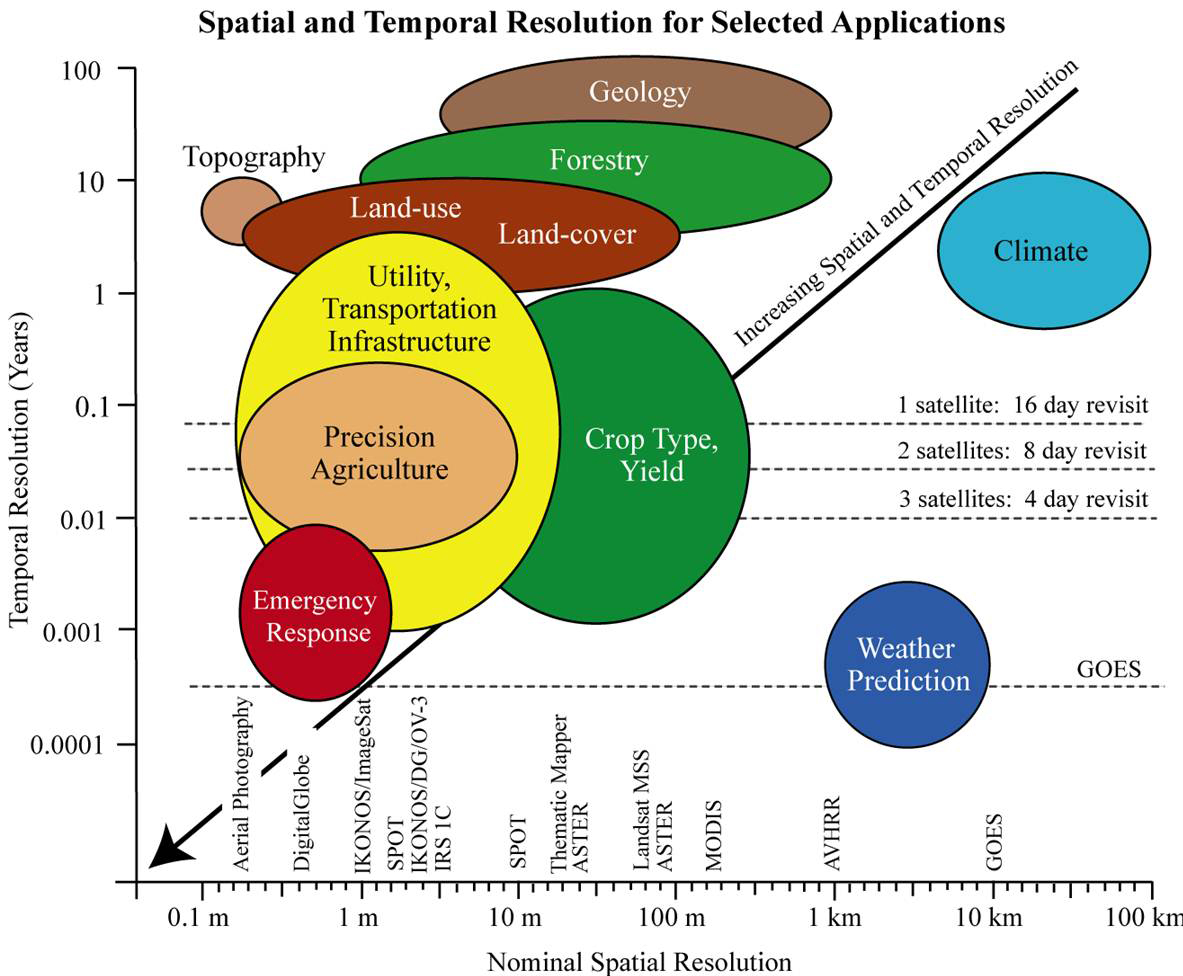
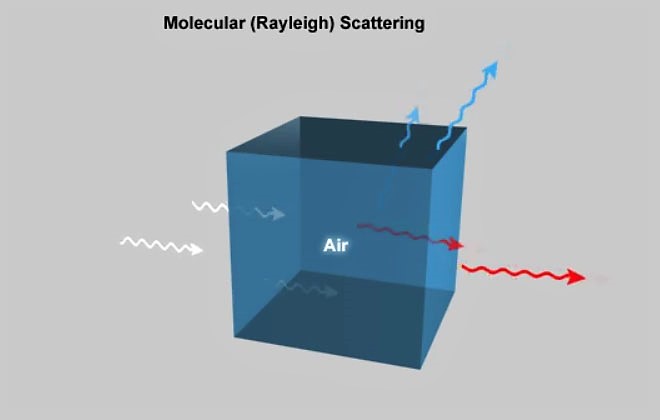
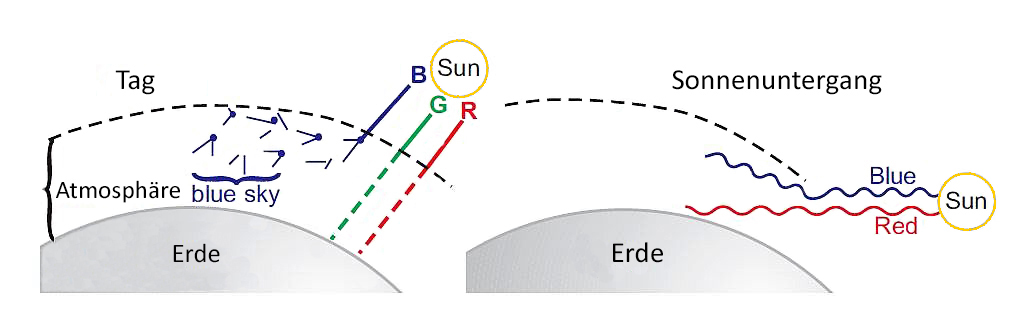
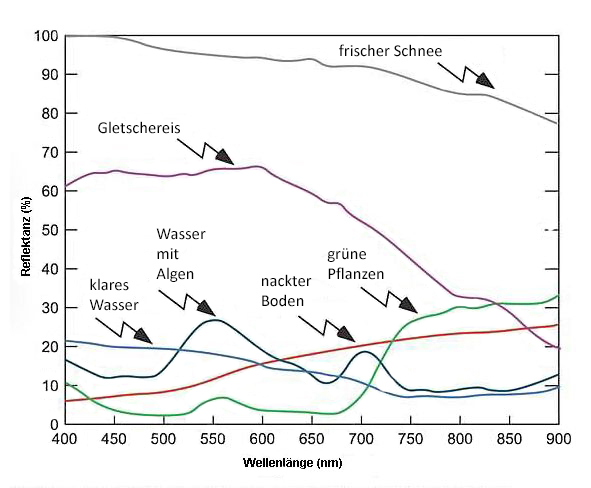
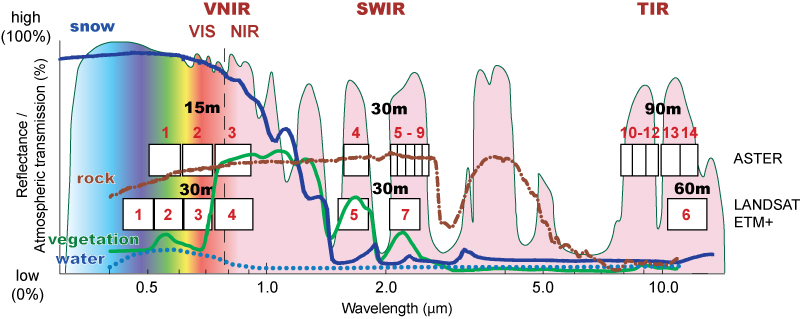
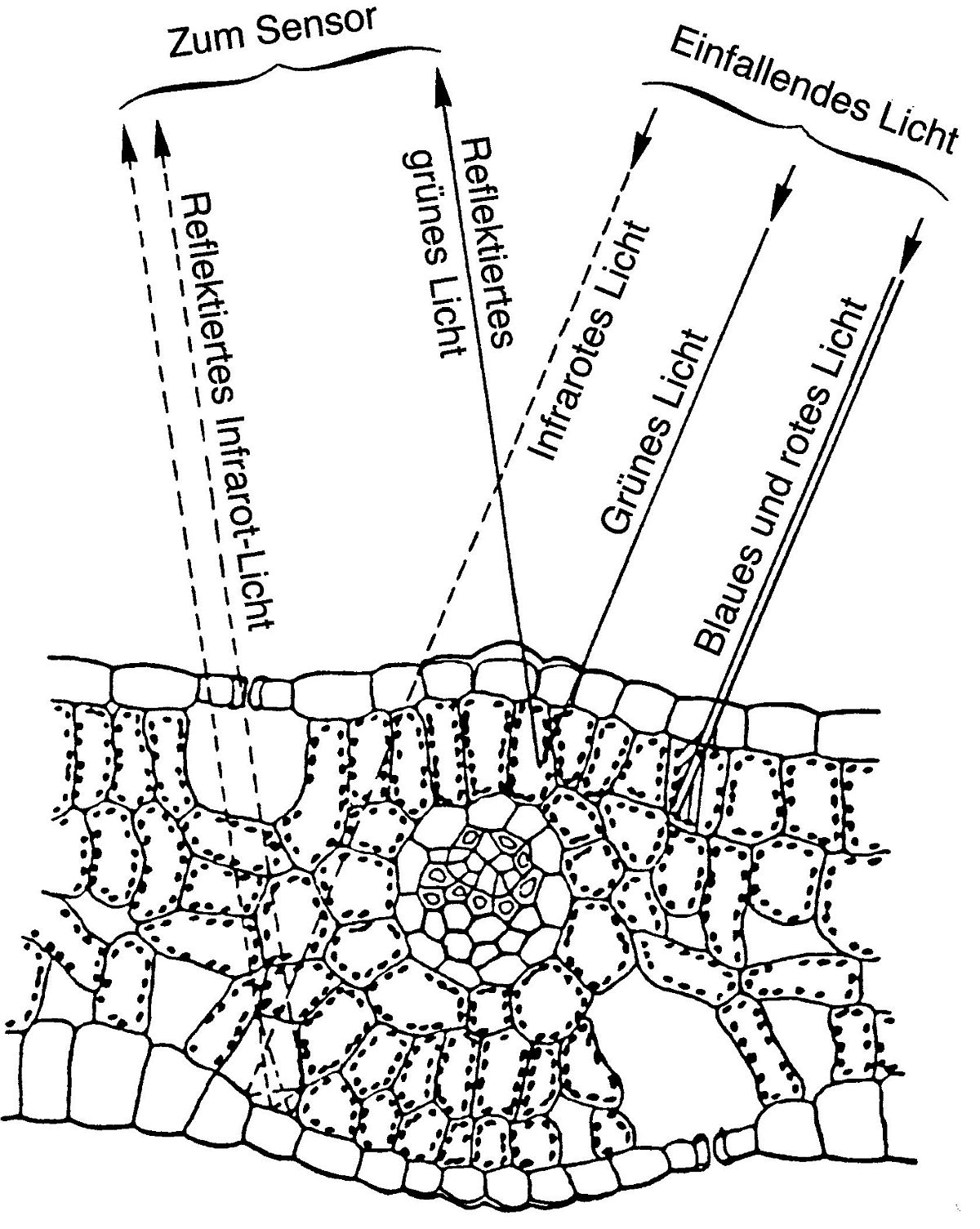
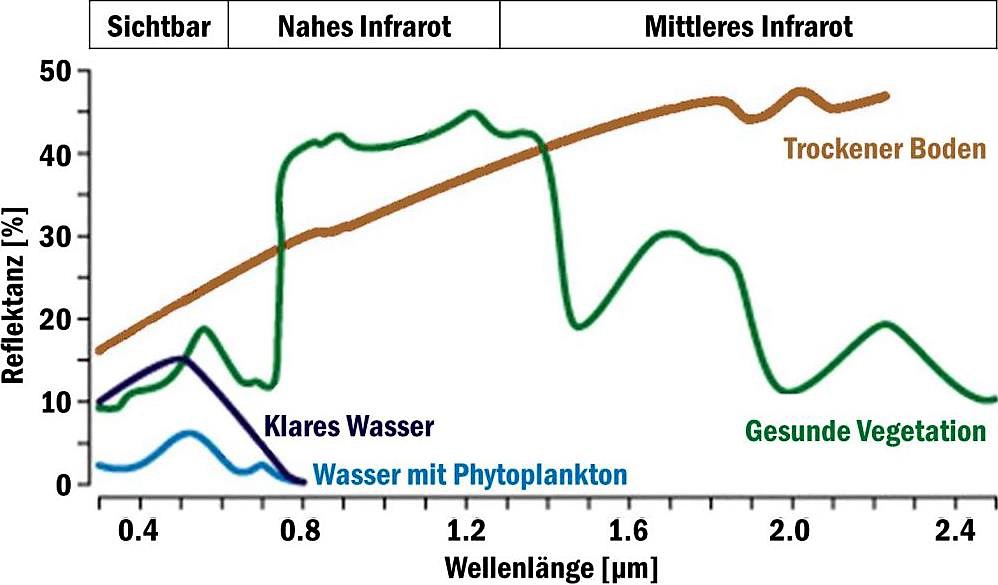
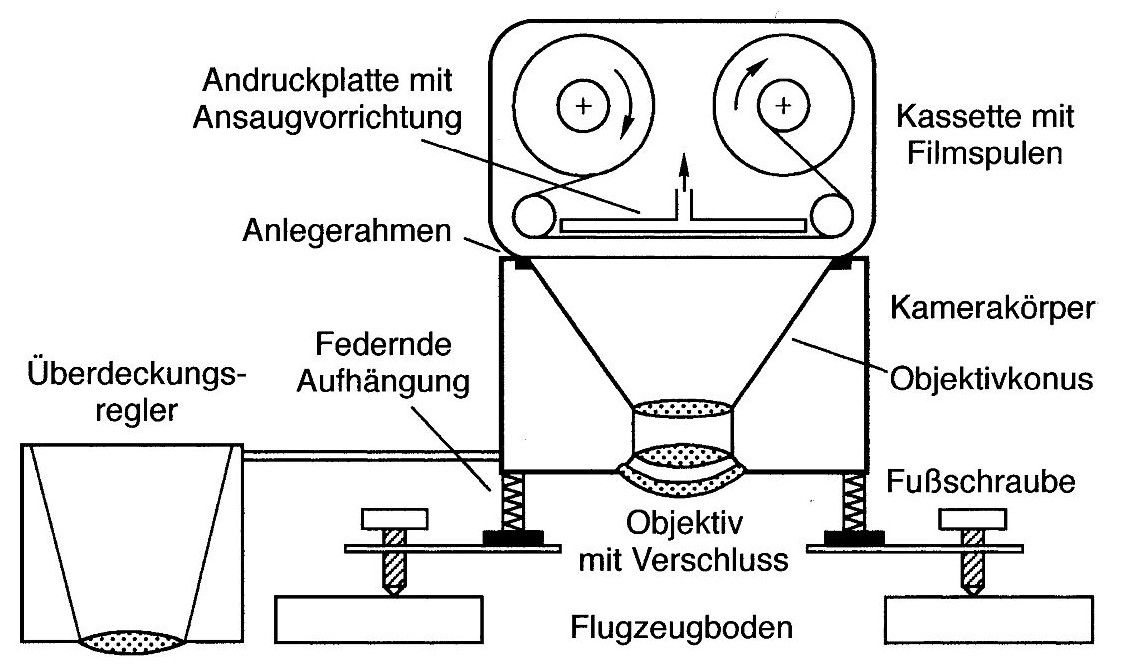

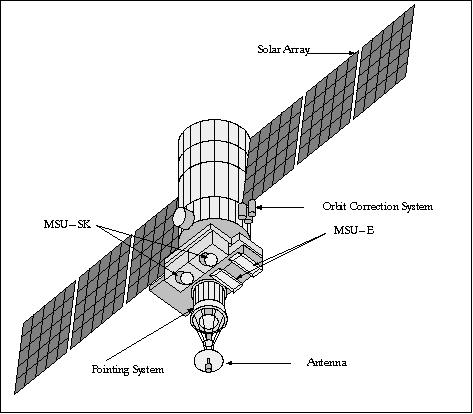


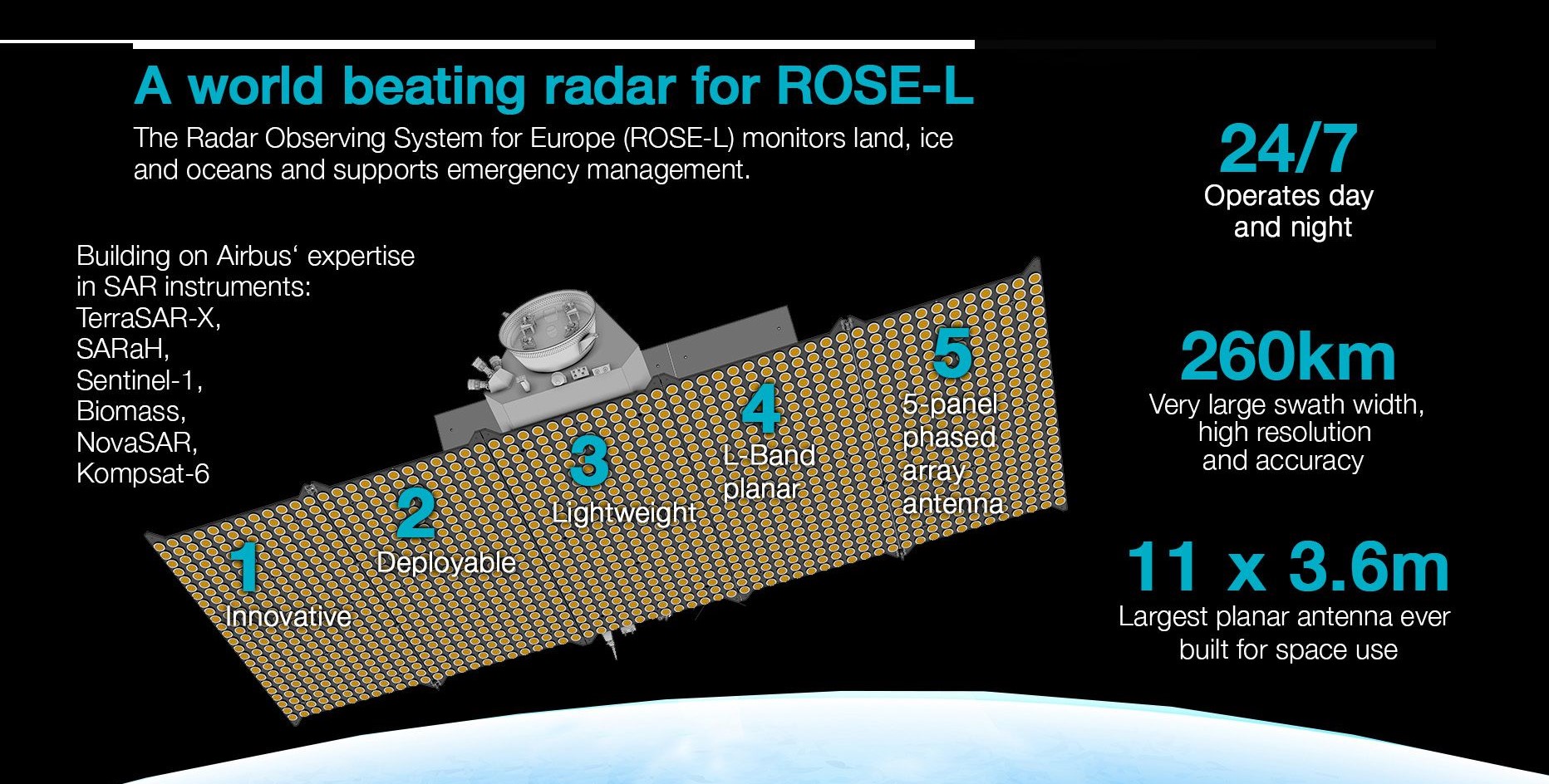
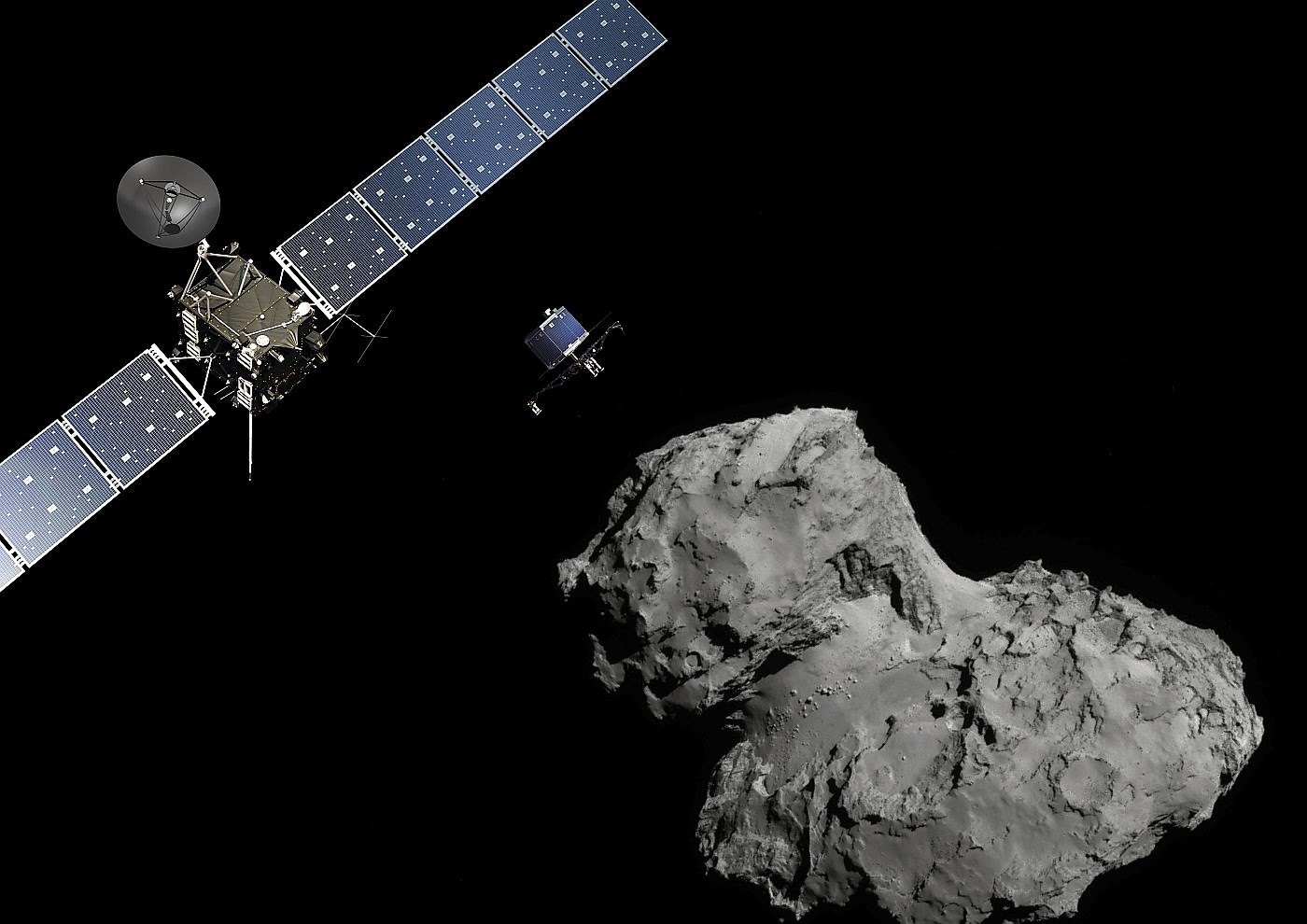
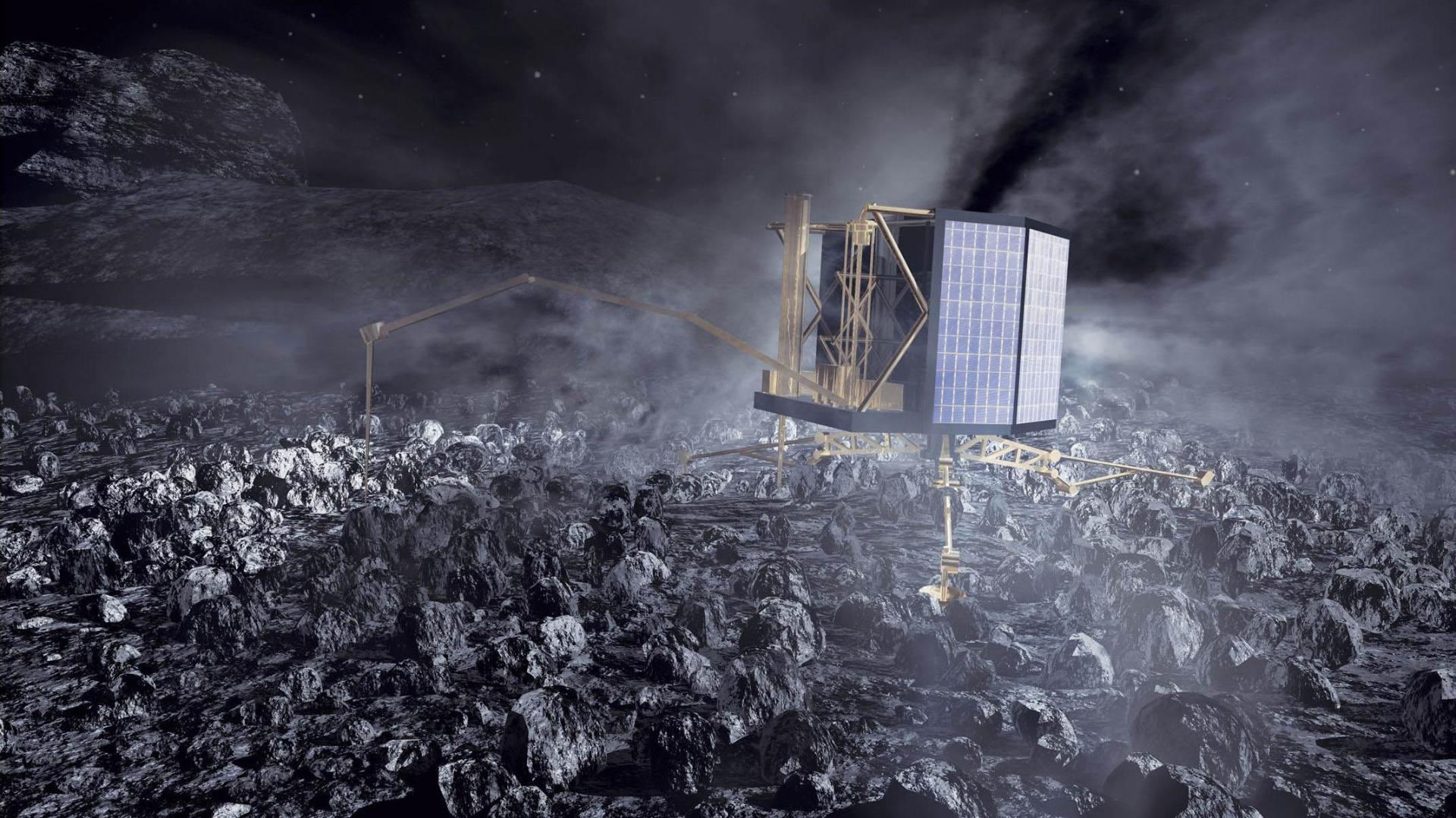
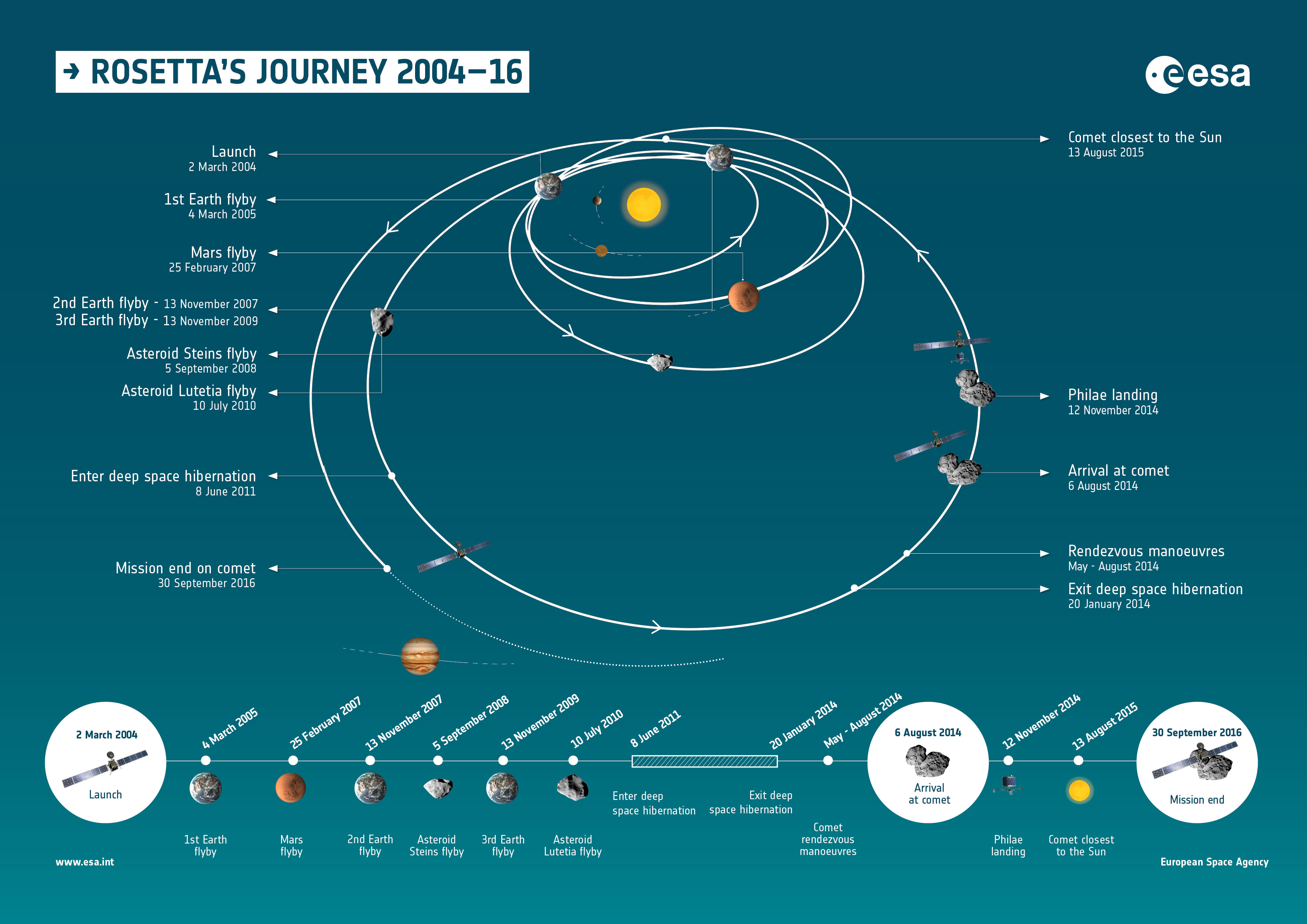
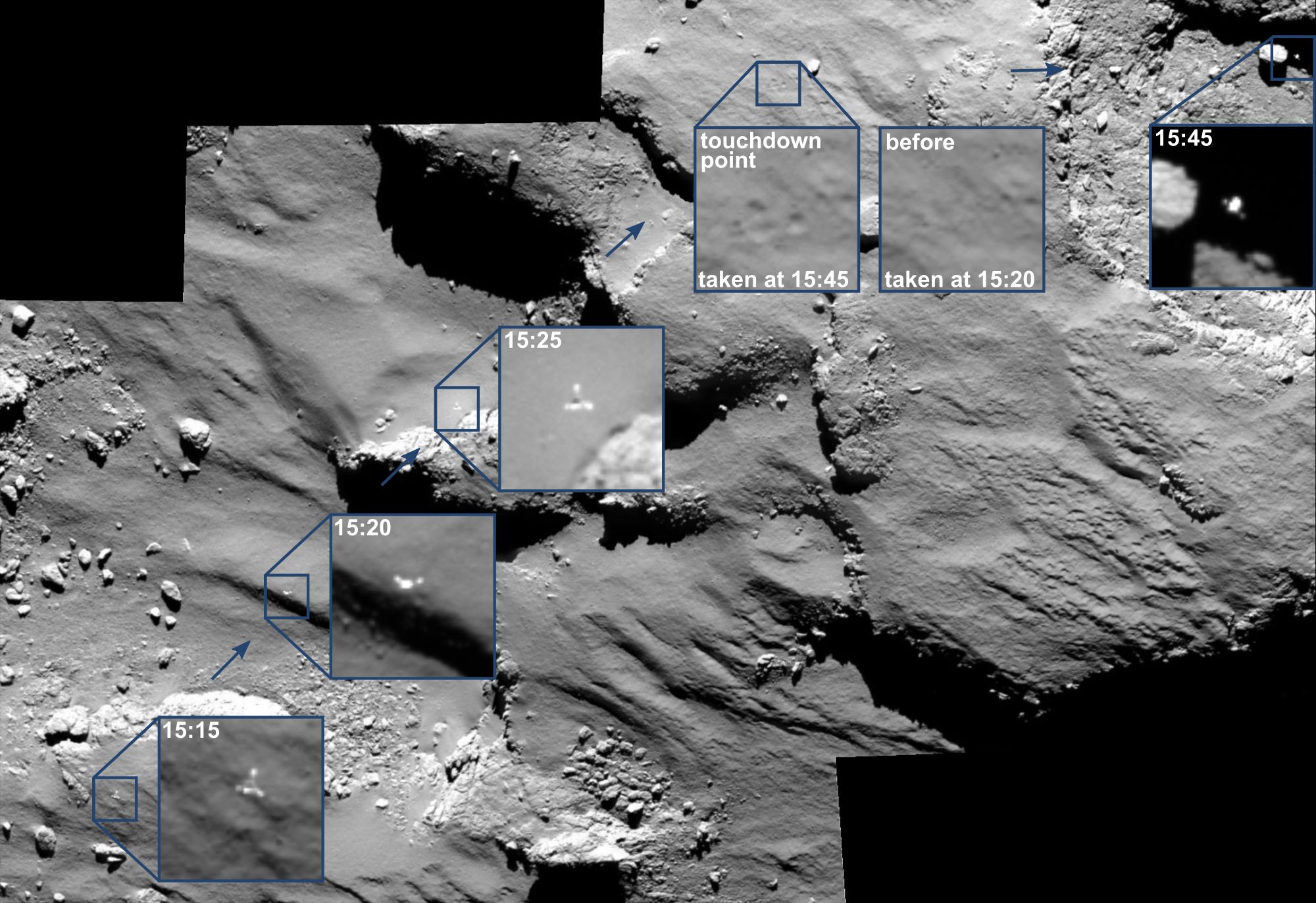
 Quelle:
Quelle: 
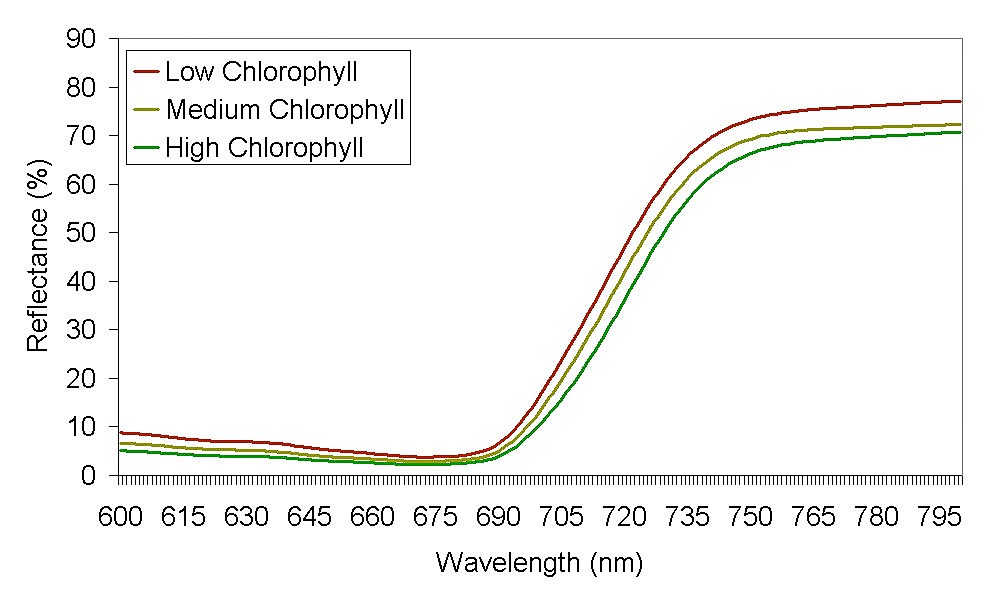
{kind=link}
{kind=link}
{kind=link}