 von Feldern in Rio Grande do Sul, Brasilien vom 12. 4. 2020 (Planet)")
Global Positioning System (GPS)
Franz. systéme GPS; systéme de positionnement universel par satellites; dt. satellitengestütztes Ortungssystem zur Positionsbestimmung eines beliebigen Punktes auf der Erdoberfläche. GPS wird unter der vollständigen Bezeichnung NAVSTAR (NAVigation System with Time and Ranging) GPS vom U.S.-amerikanischen Verteidigungsministerium seit der Mitte der 70er Jahre aufgebaut, unterhalten und weiterentwickelt. Die Endausbaustufe wurde 1994 erreicht. Der Eigenname des Satellitensystems wurde jahrzehntelang als Synonym für die Satellitennavigation verwendet.
Die Lebensdauer der Satelliten ist auf 10 Jahre ausgelegt, sie werden bei Bedarf ersetzt. Für zivile Nutzer ist eine ständige Verfügbarkeit im Rahmen des Standard Positioning Service (SPS) garantiert. Das Messprinzip ermöglicht den Einsatz sowohl für feste Beobachtungsaufstellung, als auch für bewegte Messträger wie Personen, Fahrzeuge und Satelliten.
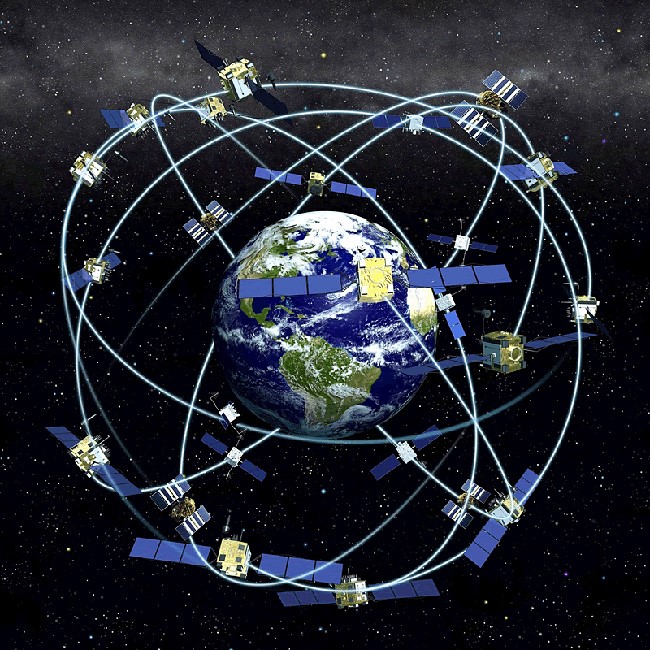 | Global Positioning System I Die 24 in 6 Orbitalebenen angeordneten Satelliten des GPS-Systems. Die Umlaufbahnen der GPS-Satelliten sind gegenüber dem Erdäquator um etwa 55° geneigt. Das System ist so ausgelegt, dass zu jedem Zeitpunkt weltweit mindestens vier Satelliten in einer Höhe von mindestens 15° über dem Horizont sichtbar sind. Quelle: NOAA |
 | Global Positioning System II GPS-Satellit Block III, Exemplar des aktuellen, zwischen 2018 und 2023 ins All gebrachten Systems Quelle: Lockheed Martin |
Die Satellitenkonfiguration besteht nominell aus 24 Satelliten in einer Bahnhöhe von 20.200 km und ist so gestaltet, dass von jedem Punkt der Erde aus gesehen jederzeit mindestens vier Satelliten über dem Horizont stehen. Die Satelliten vollziehen zwei komplette Erdumläufe in weniger als 24 h.
Das Navigationsprinzip beruht auf der gleichzeitigen Messung sog. Pseudoentfernungen zwischen mindestens vier Satelliten und einem GPS-Empfänger auf der Nutzerseite. Dazu senden die Satelliten auf zwei Trägerfrequenzen kodierte Signale sowie die vom Kontrollsegment bestimmten Broadcastephemeriden zur Berechnung der Satellitenpositionen aus. Aus den jeweiligen Satellitenpositionen und den aus der Laufzeitmessung durch Multiplikation mit der Ausbreitungsgeschwindigkeit ermittelten Pseudoentfernungen wird empfängerintern in Echtzeit oder durch nachträgliche Bearbeitung der aufgezeichneten Daten die Nutzerpositionen berechnet.
Wegen der Bedeutung der genauen Laufzeitmessung der Satellitensignale sind die Satelliten mit hochpräzisen Uhren ausgestattet, die eine Genauigkeit von unter 3 Nanosekunden besitzen. Je nach Messanordnung, Satellitenkonfiguration, Signalnutzung und Fehlermodellierung lassen sich sehr unterschiedliche Genauigkeiten erzielen. Wesentliche Fehlerquellen sind die verfügbaren Bahninformationen, die Signalausbreitung in der Atmosphäre sowie in der Antennenumgebung und die aus militärischen Gründen eingeführte Signalverschlechterung.
Mit einem einzelnen Empfänger wird für zivile Nutzer (Handgerät) meist eine Genauigkeit von ca. 10-20 m erzielt. Durch Relativmessungen (Differentielles GPS, DGPS) zu bestehenden oder gesondert eingerichteten GPS-Referenzstationen lässt sich eine Genauigkeit von 2 bis 5 m, erzielen, mit professionellen Geräten auch darunter.
Differentielles Globales Positionierungssystem (DGPS)
Die englische Bezeichnung 'Differential Global Positioning System' ist vom amerikanischen GPS abgeleitet, obwohl inzwischen auch Signale anderer Satellitennavigationssysteme in das Verfahren einbezogen werden.
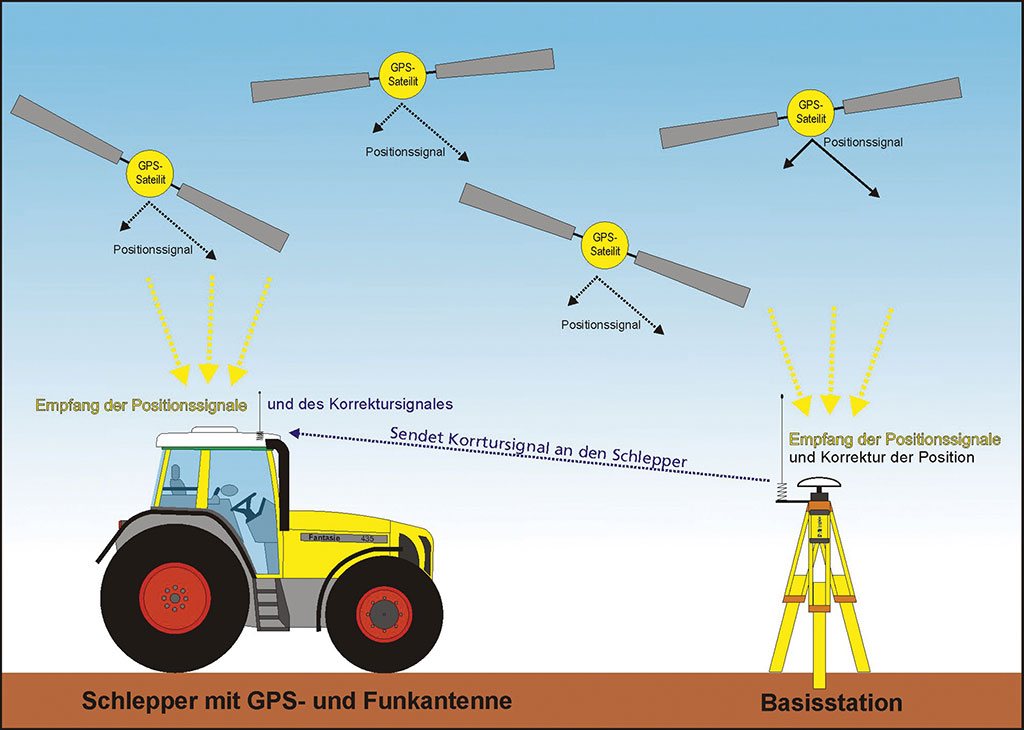
Die Erhöhung der Genauigkeitsbestimmung des Global Positioning System geht von dem Grundsatz aus, dass die GPS-Messgrößen bei benachbarten Empfängerpunkten Fehler gleicher Größenordnungen aufweisen. Somit werden zwei zeitgleiche Messungen mit zwei benachbarten Empfängern durchgeführt. Gegenüber der Messung mit dem beweglichen Empfänger im Gelände (sog. Rover) sind die Koordinaten der ortsfesten Referenzstation exakt bekannt. Dadurch kann die Differenz zwischen den (aktuell) gemessenen Pseudoentfernungen und den berechneten, geometrischen Entfernungen zu den Satelliten bestimmt werden. Diese Differenzwerte (Korrekturwerte) werden an den Empfänger (Roverstation) übertragen, der die Korrekturen der Pseudoentfernungen errechnet. Durch diese Fehlerkorrektur beim Differentiellen GPS (DGPS) ist bei Einzelpunktmessungen eine sehr hohe Genauigkeit zu erzielen. Referenzstationen können zum einen ortsfest und unbeweglich z.B. auf Dächern montiert sein, d.h. sehr häufig auf den Dächern der lokalen Vermessungs- und Katasterämter, und zum anderen nur bei jeweils einer Messkampagne ortsfest im Gelände bei bekanntem Bezugspunkt, insgesamt aber mobil sein (vgl. auch mobile Referenzstationen im Precision Farming).
 | DGPS-Einsatz im Agrarbereich Mit der Verarbeitung von mindestens 3 Satellitensignalen kann eine Standortbestimmung erfolgen. Mindestens 4 Signale sind erforderlich, um zusätzlich die aktuelle Höhe über Null zu bestimmen. Flächenvermessung, Positionsbestimmungen zur GPS-gestützten Bodenprobenahme, Bonitierungen in Flächen oder Unkrautkartierungen, Routenplanung und Flottenmanagement, exaktes Anschlussfahren oder Fahrspuraufzeichnung zur Dokumentation von Arbeiten sind denkbare Anwendungen in der Landwirtschaft. |
 | Mobile DGPS-Referenzstation Um den vollen Vorteil von GNSS nutzen zu können, ist eine hochgenaue Positionsmessung im Zentimeterbereich notwendig. Die hochgenauen differentielle Korrekturen (DGPS) im Sekundentakt können per Abonnement von einem Referenzierungsdienst bezogen werden, können aber auch von mobilen Referenzstationen erzeugt werden. Mobile Referenzstationen sind GPS-Zweifrequenzempfänger, die zusätzlich eine Trägerphasenmessung durchführen. Per Funk werden die Korrekturdaten an die Landmaschinen, z.B. Mähdrescher, übertragen. |
Die Vermessungsverwaltungen der Länder der Bundesrepublik Deutschland bieten den Satellitenpositionierungsdienst SAPOS an, der ein Gemeinschaftsprodukt der Arbeitsgemeinschaft der Vermessungsverwaltungen der Länder der Bundesrepublik Deutschland (AdV) ist. SAPOS stellt Korrekturdaten bereit, mit denen die Positionsgenauigkeit je nach Aufwand bis in den Millimeterbereich gesteigert werden kann. Dieser Dienst basiert auf einem Netz von permanent messenden Referenzstationen, die von den jeweiligen Landesvermessungen eingerichtet und betrieben werden. Die Daten sind bundesweit einheitlich nutzbar.
Weitere Informationen:
- GPS: The Global Positioning System
- GPS Basics (Federal Aviation Administration)
- All about GPS (Trimble)
- GPS Accuracy (GPS.gov)
- Satellitengeodäsie 1, GPS (M. Rothacher, TU München)
- Sondierung der Atmosphäre mit GPS (GeoForschungszentrum Potsdam)
- GPS und GNSS: Grundlagen der Ortung und Navigation mit Satelliten (Jean-Marie Zogg)
- GNSS-Radiookkultation: Globale atmosphärische Klimauntersuchungen mit Signalen von Navigationssatelliten (GFZ)