 von Feldern in Rio Grande do Sul, Brasilien vom 12. 4. 2020 (Planet)")
Laserscanner
Syn. Laserabtaster; franz. scanneur à laser; flächenhaft abtastende, häufig flugzeuggestützte Sensoren, die zur direkten Erfassung der topographischen Geländeoberfläche dienen. Das System ermöglicht ein automatisches Messen von dreidimensionalen polaren Koordinaten der flächenhaft verteilten Reflexionspunkte und somit eine räumliche Objekterfassung.
Laserscanner finden heute in unterschiedlichen Konstellationen ihre Anwendungen bei der Gewinnung von Daten, so z.B. als:
- Terrestrisches Laserscanning (TLS) mit Reichweiten zwischen 1 m bis 1000 m und Registriergenauigkeiten im Bereich weniger Millimeter.
- Airborne-Laserscanning (ALS) mit Reichweiten zwischen 500 bis 1500 m und Registriergenauigkeiten im Bereich des Dezimeters
- Mobiles Laserscanning (MLS) mit Reichweiten bis etwa 200 m und Registriergenauigkeiten im Bereich weniger Zentimeter
Beim Terrestrischen Laserscanning (TLS) wird die Oberflächengeometrie von Gegenständen mittels Pulslaufzeit, Phasendifferenz im Vergleich zu einer Referenz oder durch Triangulation von Laserstrahlen digital erfasst. Dabei entsteht eine diskrete Menge von Abtastpunkten, die als Punktwolke bezeichnet wird. Die Koordinaten der gemessenen Punkte werden aus den Winkeln und der Entfernung in Bezug zum Ursprung (Gerätestandort) ermittelt.
Im Gegensatz zur luftgestützten Anwendung kann bei TLS von statischen Aufnahmesituationen ausgegangen werden. Mit fortschreitender Technik werden TLS-Systeme aber auch zunehmend auf mobilen Plattformen (Kfz, Schiff, Zug) installiert um großräumige linienhafte Strukturen, wie Lichtraumprofile einer Eisenbahntrasse, zu erfassen. In diesem Falle spricht man zunehmend von kinematischen terrestrischen Laserscanning (k-TLS) bis hin zu Mobile Mapping-Systemen, wie sie beispielsweise für die Datenerfassung bei Google Street View zum Einsatz kommen.
Eine weitere Untergliederung ermöglicht die dimensionale Betrachtungsweise für 2D- und 3D-Anwendungen.Beim 2D-Laserscanning wird die Kontur von Gegenständen auf einer Ebene digital erfasst. In Sicherheitssystemen wird 2D-Laserscanning als berührungslos wirkende Schutzeinrichtung benutzt um zu erkennen, ob Personen oder Gegenstände definierte (Gefahren-)Bereiche überschreiten um dann entsprechende Maßnahmen einleiten zu können (z. B. Abschaltung von Maschinen). 2D-Laserscanner werden auch eingesetzt um Objekte automatisch zu erkennen, so zum Beispiel auf den Lkw-Maut-Kontrollbrücken auf deutschen Autobahnen. Weitere Anwendungsgebiete sind die Erstellung von Karten in der Robotik sowie die Erkennung von Hindernissen bei autonomen mobilen Robotern.
Das 3D-Laserscanning liefert als Ergebnis dreidimensionale Punktwolken und somit ein vollständiges Abbild der Messszene. Anhand der Punktwolke werden entweder Einzelmaße wie z. B. Längen und Winkel bestimmt oder es wird aus ihr eine geschlossene Oberfläche aus Dreiecken konstruiert und z. B. in der 3D-Computergrafik zur Visualisierung verwendet. Der Einsatz des terrestrischen 3D-Laserscanning umfasst zahlreiche Gebiete der Bestandsaufnahme und beginnt in der Architekturvermessung mit Schwerpunkten in der Bauforschung und Denkmalpflege. Weitere Anwendungsgebiete sind beispielsweise der Rohrleitungs- und Anlagenbau, die Archäologie, der Denkmalschutz, Reverse-Engineering und Qualitätssicherung sowie der Tunnelbau, die Forensik und Unfallforschung.
Ein Laserscanner, dessen Entfernungsbestimmung nach dem Impuls- oder Phasenmessverfahren funktioniert, speichert zusätzlich den Reflexionsgrad des Laserlichtes ab. In Kombination mit einer (u. U. externen) Digitalkamera können die Punktwolken zudem mit photorealistischen Texturen versehen werden.
Das Airborne Laserscanning (ALS) dient i.A. zur Erfassung von Geländehöhen und Objekten auf dem Gelände und ersetzt zunehmend die klassische Photogrammetrie. Die Sensorik operiert von Flugzeugen oder Hubschraubern aus. Bei der Entfernungsermittlung zum zu erfassenden Objekt können unterschiedliche Messprinzipen zum Einsatz kommen. Bei der Messung unter Ausnutzung der Lichtlaufzeit werden einzelne, kurze Laserpulse ausgesandt und die vom Objekt reflektierte Strahlung mit Sensor registriert. Die Zeit, die zwischen ausgesandten und empfangenen Pulsen liegt, ist ein Maß für die Entfernung zwischen der Sende- und Empfangseinheit. Alternativ kann eine Pulsfolge mit fester Frequenz ausgesandt und ihre Reflexion am zu vermessenden Objekt detektiert werden. Die Phasendifferenz zwischen ausgesandter und empfangener Pulsfolge ist ebenfalls ein Maß für die Entfernung.
Für eine korrekte Georeferenzierung der Entfernungsmessung ist es erforderlich, dass Position und Orientierung des Sensors im Raum zum Zeitpunkt der Messung bekannt sind. Im Falle des luftgestützten Laserscanning wird dazu eine Kombination aus mindestens einem GPS-Empfänger und inertialem Navigationssystem (INS) verwendet. Hierbei ist es wichtig, dass die verschiedenen Messwerte der unterschiedlichen Sensoren synchron ermittelt oder über geeignete Verfahren zumindest synchronisiert werden können. Beim luftgestützten Laserscanning lassen sich gemäß Herstellerangaben bzw. Dienstleistungsunternehmen unter günstigen Bedingungen (vegetationslose Flächen, schwache bis mittlere Geländeneigung) Genauigkeiten in der Höhe von 5–15 cm und in der Lage von 30 bis 50 cm erreichen. Mittels geeigneter Verfahren lassen sich dann aus den Daten der Entfernungsmessung und der Komponente GPS/INS dreidimensionale kartesische Koordinaten der gemessenen Punkte ableiten.
Die auf dem Markt für unterschiedliche Einsatzzwecke angebotenen Laserscanner können nach dem Messprinzip unterschieden werden in:
- Gepulste Laser bieten die Möglichkeit, die erste und letzte Reflektion des ausgesandten Signals getrennt zu messen. Daher kann bei einer Messung im Wald, aufgrund der hohen Durchdringungsraten durch Laub- und Nadelwaldbestände, zwischen dem Bodenprofil (letzte Reflektion) und dem Bedeckungsprofil (erste Reflektion) unterschieden werden.
- Dieses Prinzip liegt beim permanent messenden Continuous Wave Laser nicht vor. Er ist damit ungeeignet für Waldgebiete, da er eine mittlere Höhe zwischen Waldboden und Laubfläche liefern wird.
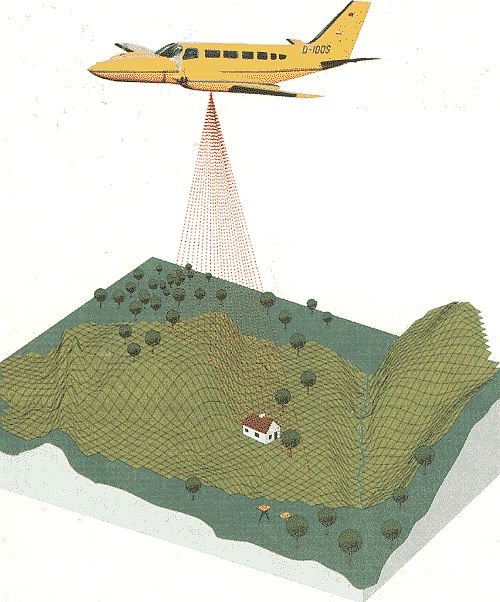 | Prinzip des Laserscanners Eine in den letzten Jahren entwickelte Alternative zur Luftbildphotogrammetrie stellt die Vermessung des Geländes durch in Flugzeuge eingebaute Laserscanner dar. Mit deren Hilfe kann sogar in Waldgebieten die Geländeoberfläche mit hoher Genauigkeit vermessen werden, ebenso wie die darauf befindlichen Objekte. Quelle: HS Karlsruhe (R.o.) |
Hinsichtlich des Scanprinzips kann noch zwischen Scannern mit kippenden oder rotierenden Spiegeln bzw. mehrfach nebeneinander-liegenden Laserdioden, wobei jeder Diode eine bestimmte Meßrichtung zugewiesen wird, differenziert werden. Die Öffnungswinkel für die flächenhafte Abtastung liegen bei etwa 10 Grad. Bei Flughöhen von 1.000 - 1.500 m sind Genauigkeiten in der Lage von 1 m und in der Höhe von 0,1 - 0,3 m zu erreichen. Die erreichbare Genauigkeit wird im Wesentlichen durch die Genauigkeit der Sensorpositionierung/-orientierung mittels GPS und INS limitiert. Da i.d.R. 4 Punkte pro m² vorliegen, kann daraus ein repräsentativer Punkt für eine Rasterzelle der Größe 1x1 m berechnet werden. Ergebnis ist z.B. ein Geländemodell in Rasterform mit der Rasterzellengröße von 1x1 m. Diese Raster-DGM, kombiniert mit digitalen Orthophotos sind ideale Datenquellen für 3-D-Stadtmodelle, für Senderstandortplanung im Mobilfunk, für Hochwassersimulation, für Waldgebietskartierung und Virtual Reality-Szenen.